

Positioning method based on environment line features
A technology of straight line feature and positioning method, applied in two-dimensional position/channel control and other directions, can solve the problems of large cumulative error, time-consuming and labor-intensive, unable to form a closed loop, etc., and achieve the effect of high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] See attached picture. This embodiment includes the following steps:
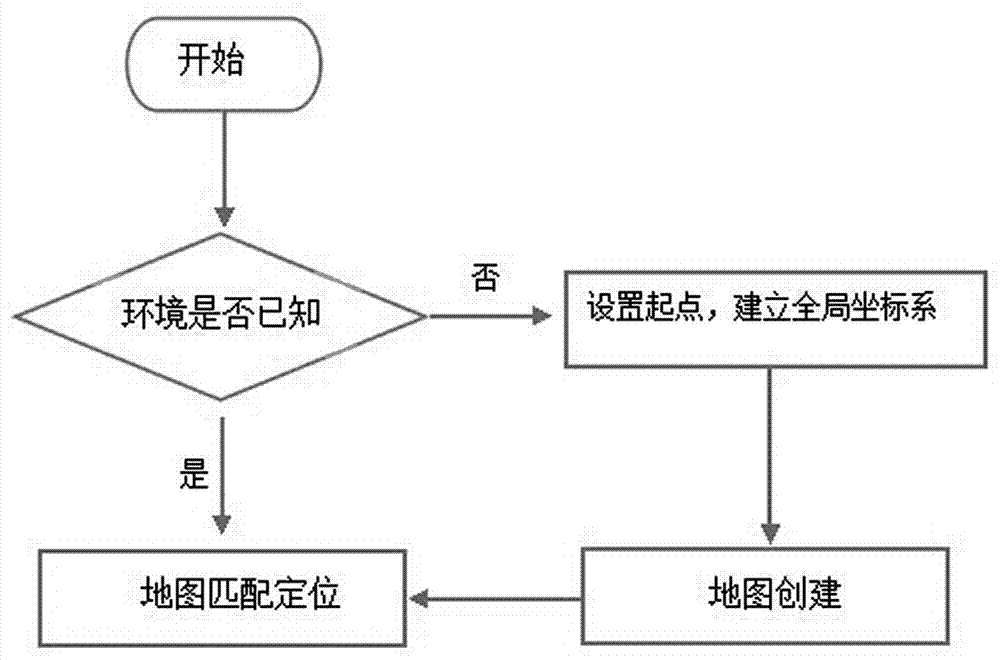
[0029] 1) First, in the new unknown environment, set the starting point pose Z0, and set the global coordinate system based on this, that is, take the starting point position as the origin of the coordinate system, take the starting point movement direction as the positive direction of the y-axis, and determine x according to the right-hand rule positive axis;
[0030] 2) Control the robot to move in the environment to autonomously create an environmental feature map;
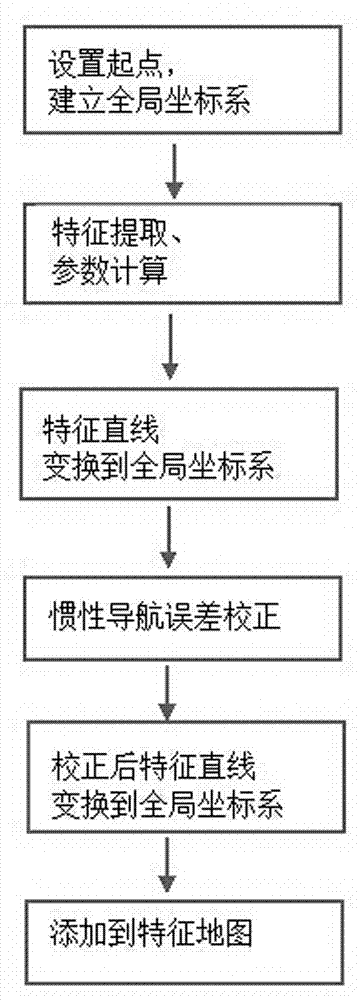
[0031] 3) if figure 1 The shown mainly includes map creation module and map matching positioning module; for example image 3 The process of autonomous map creation based on environmental features is shown:
[0032] The robot starts to move from the starting point, and the laser sensor on the robot continuously scans the environmental information to obtain the angle and distance polar coordinate point data with the laser sensor as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More