

Robot
A technology of robots and moving mechanisms, applied in the field of robots, can solve the problems of low rigidity, narrow range of posture changes, embedding failure, etc., and achieve the effect of high rigidity and wide range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below, based on the attached drawings, while referring to Figure 1 to Figure 7 A robot according to an embodiment of the present invention will be described.
[0029] The robot according to the present embodiment is an industrial robot suitable for assembly work of devices having relatively small components such as personal computers and mobile phones, especially for work requiring operational precision.
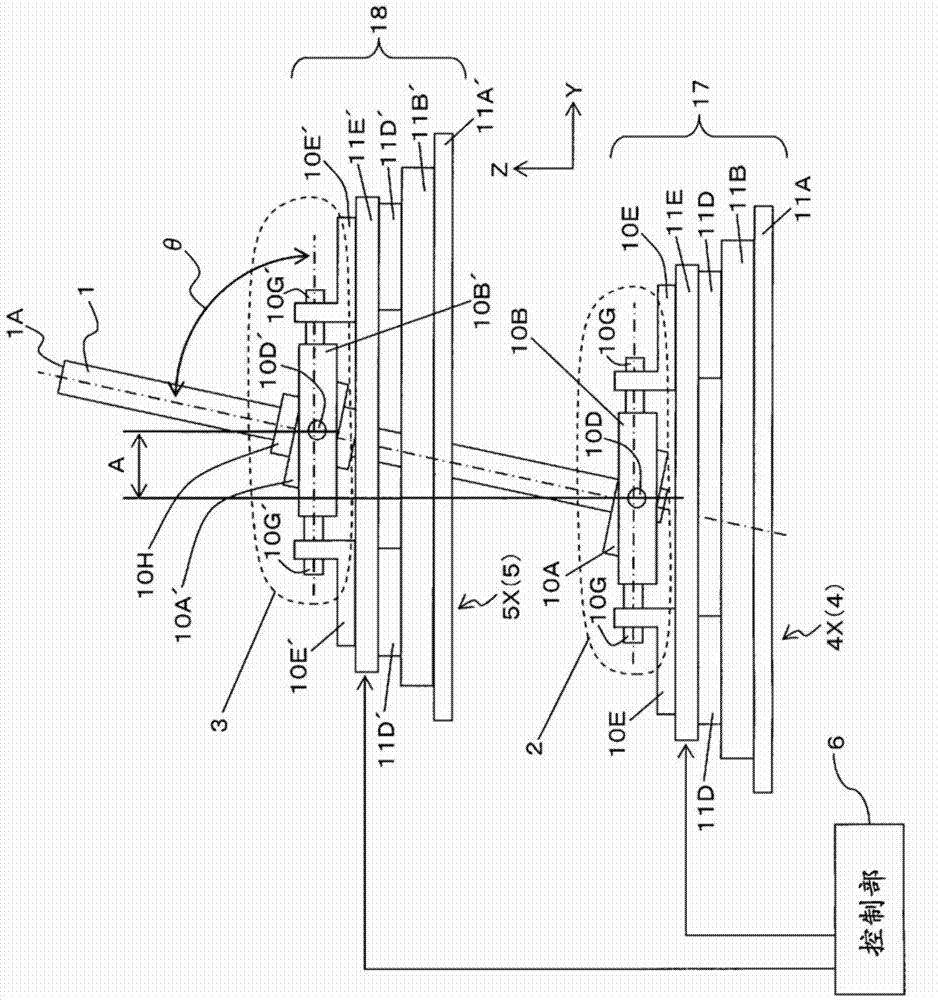
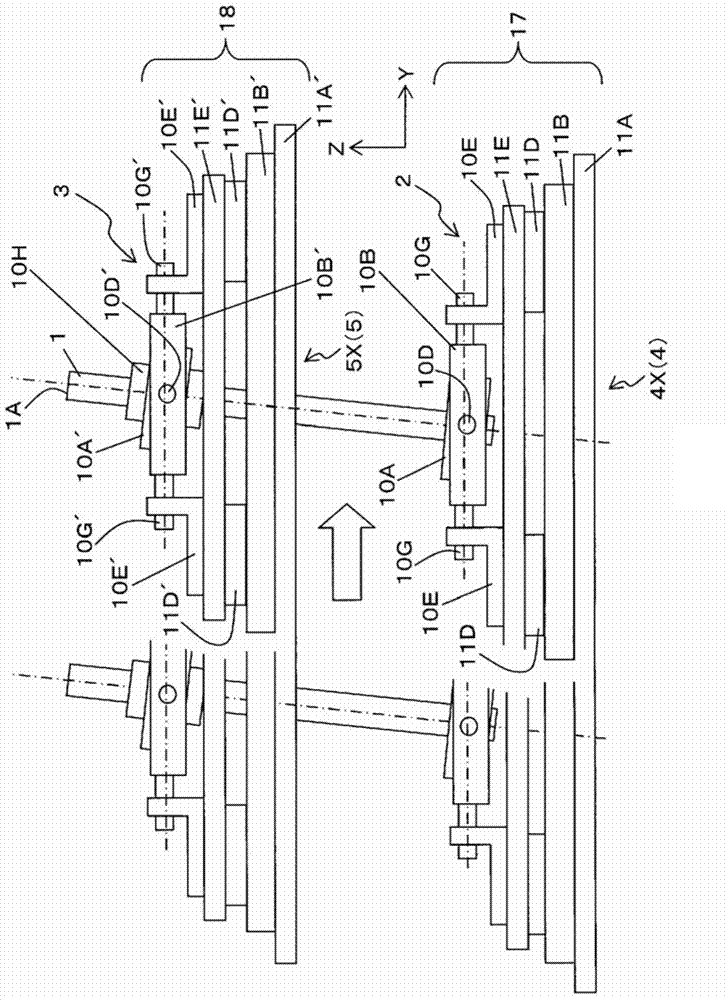
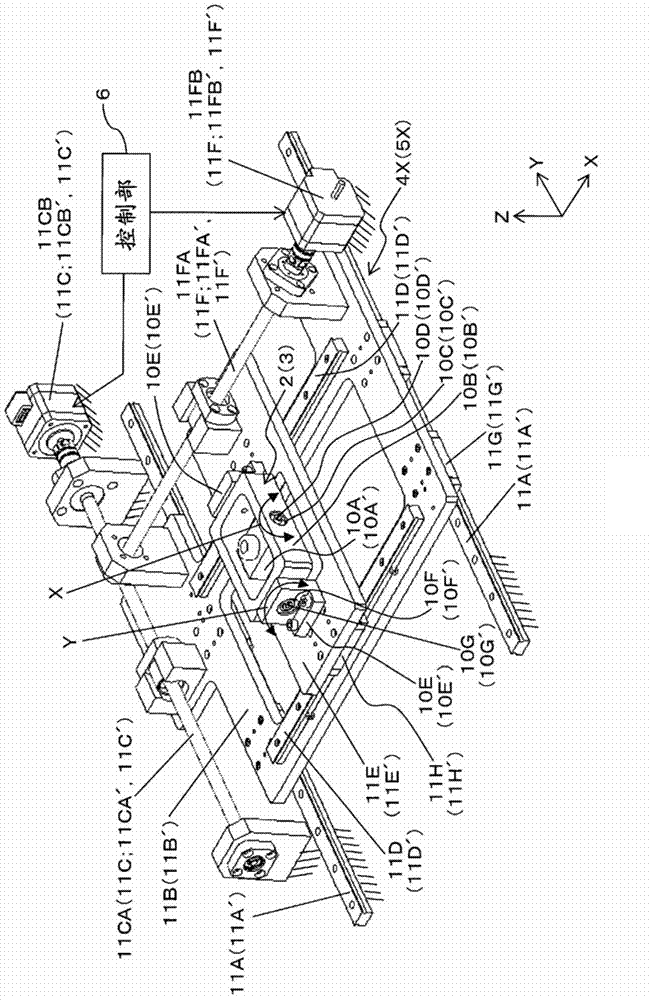
[0030] Such as figure 1 As shown, the robot of this embodiment includes a tool shaft 1 , a first support mechanism 2 , a second support mechanism 3 , a first in-plane movement mechanism 4 , a second in-plane movement mechanism 5 , and a control unit 6 .
[0031] Here, the tool shaft 1 is a shaft on which various tools, tables, etc. are attached to the front end 1A. For example, an end effector such as an air chuck, a table for holding a workpiece, and the like are attached to the front end 1A of the tool shaft 1 .
[0032] The first support mechanism 2 is attached...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More