

Calculation and model selection method for wrist motor and speed reducer of multi-degree-of-freedom robot
A technology of reducer and robot, which is applied in computing, instrumentation, electrical and digital data processing, etc., and can solve the problems of heavy workload and low efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
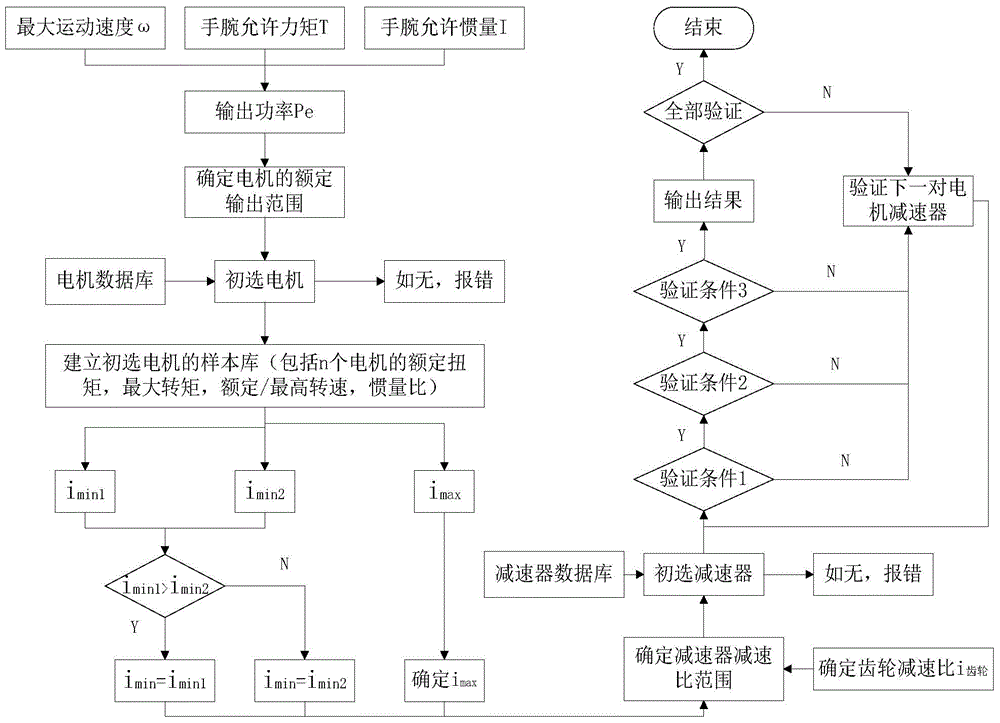
[0059] Example 1: Calculation and selection method when the motor and reducer series have been determined
[0060] (1) Establish motor and reducer sample database
[0061] Yaskawa Electric and Teijin reducer are used in this embodiment. Yaskawa Electric's series are: SGMAH, SGMPH, SGMGH (1500r / min), SGMGH (1000r / min), SGMSH, SGMDH, SGMCS (small capacity), SGMCS (medium capacity). The parameters include: model, rated output, rated torque, instantaneous maximum torque, maximum speed, rotor moment of inertia, load motor inertia ratio, etc. Teijin reducer series are: RV-E, RV-C. The parameters include: model, speed ratio, output torque, instantaneous maximum allowable torque, allowable maximum output speed, moment of inertia, etc.
[0062] (2) Primary selection of motor and reducer
[0063] The three design indicators of the wrist joint of a robot are: the maximum movement speed is 130° / s, the allowable moment of the wrist is 921N m, and the allowable moment of inertia of the ...
Embodiment 2
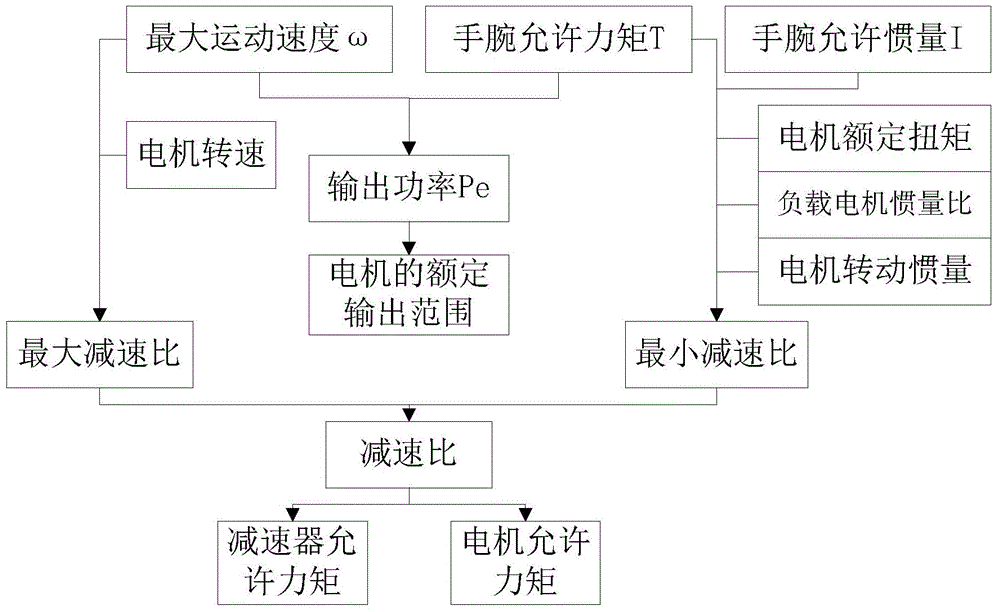
[0076] Example 2: Calculation method when the motor and reducer series are not determined
[0077] The three design indicators of the wrist joint of a robot are: the maximum movement speed is 130° / s, the allowable moment of the wrist is 921N m, and the allowable moment of inertia of the wrist is 78Kg m 2 . The power range factors are 1 and 2, and the gear reduction ratio is 2.8.
[0078] The output power Pe=2.09KW can be obtained from formula (1), then the rated output of the motor is between 2.09-4.18KW. If the motor speed is selected to be 2000r / min, the maximum reduction ratio i can be obtained by formula (7) MAX = 32.96. Take the motor rated torque T 电机额定 =28.4N·m, transmission efficiency η=0.8, load motor inertia ratio N 电机 =15, motor moment of inertia I 电机 =0.00675Kg·m 2 , then the minimum reduction ratio i can be obtained from formulas (8) and (9) MIN =20.68. Within this reduction ratio range, take the reduction ratio i=32.54. Then the maximum allowable torque...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Maximum torque | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More