

Road gradient and car state parameter combined estimation method based on parameter estimation error
A technology of parameter estimation and joint estimation, applied in the field of vehicle engineering, which can solve problems such as dependencies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0079] Embodiment 1: as Figure 1-8 As shown, a joint estimation method of road slope and vehicle state parameters based on parameter estimation error, the specific steps of the method are as follows:
[0080] According to the process described in the above invention, the slope and state parameters of a class of typical medium-sized vehicles are continuously estimated, and the numerical simulation is carried out in Matlab software.
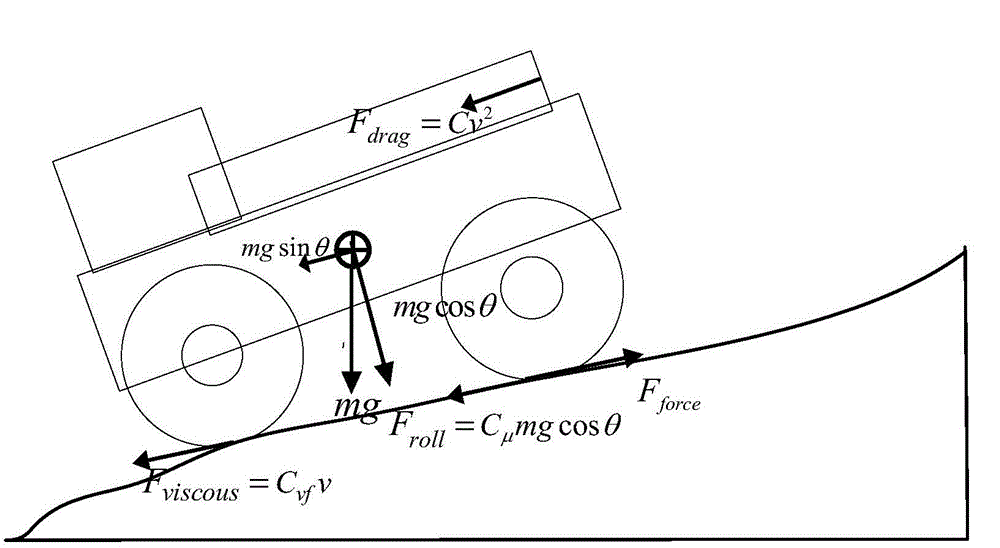
[0081] Step 1. Establish a vehicle longitudinal dynamics model: According to the vehicle dynamics theory and Newton's second law, the vehicle is subjected to force analysis, and the vehicle longitudinal dynamics model can be obtained as follows:
[0082] m v . = F force - mg sin θ - C vf v - C μ mg cos...
Embodiment 2
[0109] Embodiment 2: as Figure 1-8 As shown, a joint estimation method of road slope and vehicle state parameters based on parameter estimation error, the specific steps of the method are as follows:
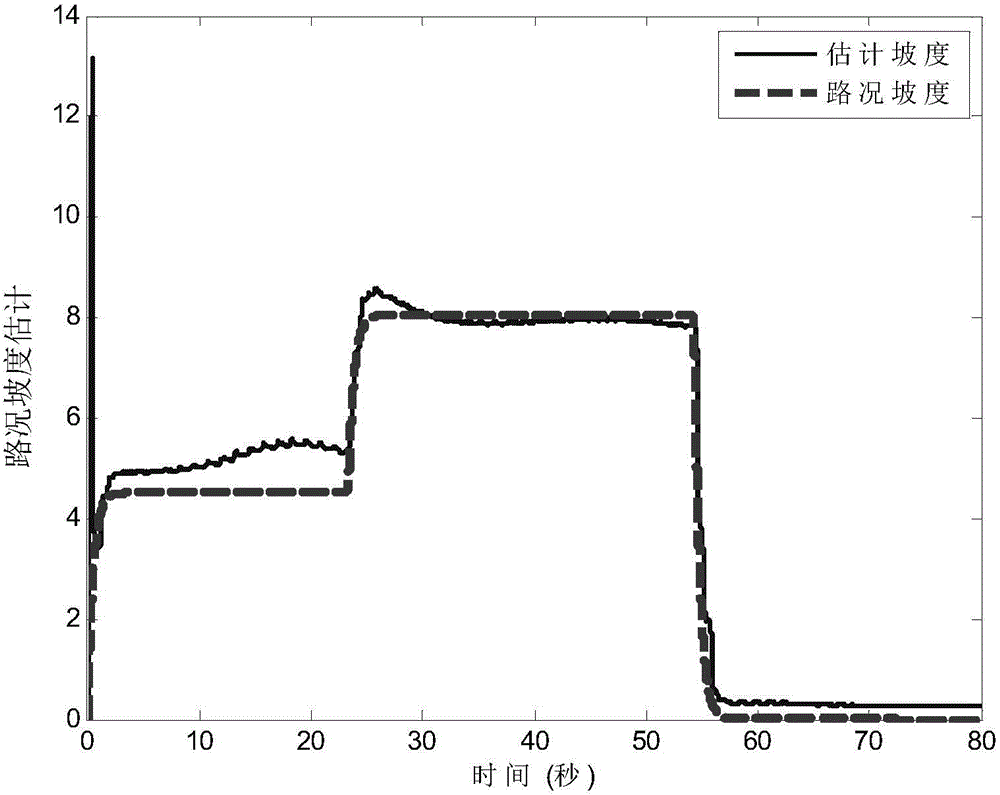
[0110] According to the process described in the above-mentioned invention, a finite time estimation is carried out for a class of typical medium-sized vehicle driving road surface slope and state parameters, and a numerical simulation is carried out in Matlab software.
[0111] Step 1. Establish a vehicle longitudinal dynamics model: According to the vehicle dynamics theory and Newton's second law, the vehicle is subjected to force analysis, and the vehicle longitudinal dynamics model can be obtained as follows:
[0112] m v . = F force - mg sin θ - C vf v - C ...
Embodiment 3
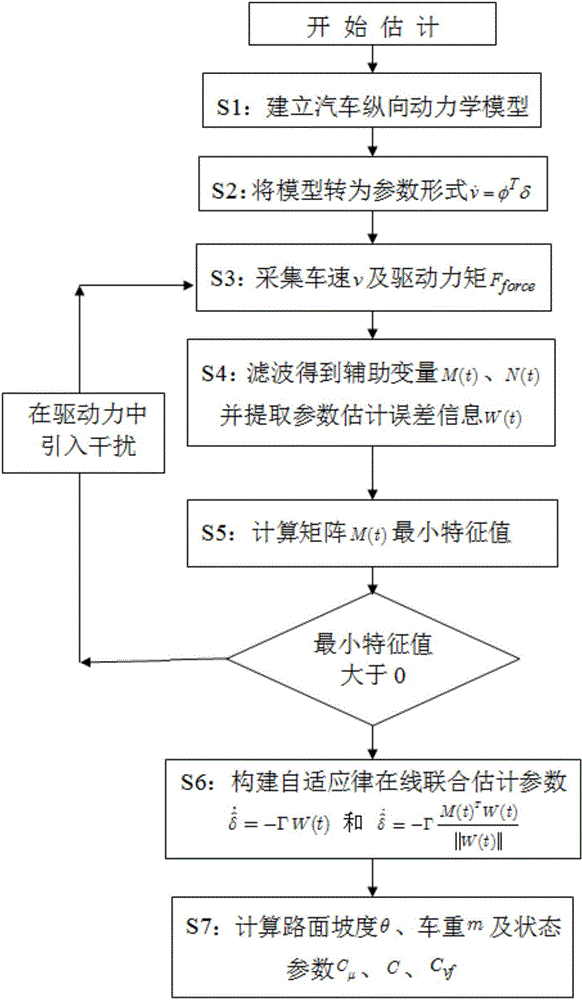
[0139] Embodiment 3: as Figure 1-8 As shown, a joint estimation method of road slope and vehicle state parameters based on parameter estimation error, first establishes a vehicle longitudinal dynamics model based on vehicle dynamics theory and Newton's second law; then obtains vehicle speed and engine driving force through vehicle sensor measurements , take it as the input of the estimation algorithm; then perform filtering operation on the vehicle longitudinal dynamics model to extract the parameter estimation error; then judge whether the excitation condition is satisfied: if it is satisfied, use the vector containing the parameter estimation error to design the adaptive law estimation Unknown parameter vector; if not satisfied, add random disturbance to the driving force, and return to re-measure; finally calculate the estimated value of road slope, vehicle weight, viscous friction coefficient, rolling friction coefficient and air resistance coefficient through basic mathem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More