

Multi-sensor information fusion-based method for measuring height of small unmanned gyroplane
A height measurement, unmanned rotor technology, applied in height/horizontal measurement, measuring devices, instruments, etc., can solve problems such as insufficient height measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
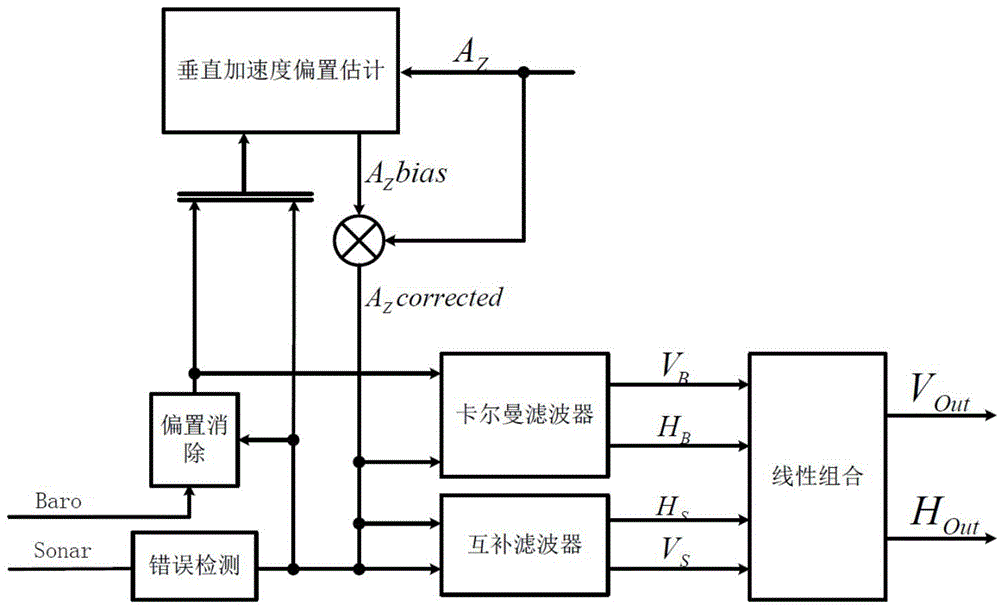
[0075] The technical scheme that the present invention adopts is: utilize the sonar installed on the bottom of the rotor UAV to collect the distance between it and the ground as the sonar measurement height; obtain the triaxial acceleration under the UAV object coordinate system through the accelerometer, combine the The attitude angle information of the man-machine is transformed into the coordinate system to obtain the vertical acceleration under the geodetic reference system; the barometer measures the air pressure information at the height of the drone, compares the air pressure information on the ground, and substitutes it into the standard atmospheric model to obtain the altitude based on the air pressure measurement. measurement information. Using the above sonar measurement altitude, drone vertical acceleration, and air pressure measurement altitude as input, the multi-sensor information fusion altitude measurement method is applied to obtain a high-frequency real-time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More