

Real-time noise reduction system and real-time noise reduction method of accelerometer and gyroscope
A technology of accelerometer and noise reduction system, which is applied in the direction of navigation through speed/acceleration measurement, navigation calculation tools, etc., to achieve the effect of reducing random noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
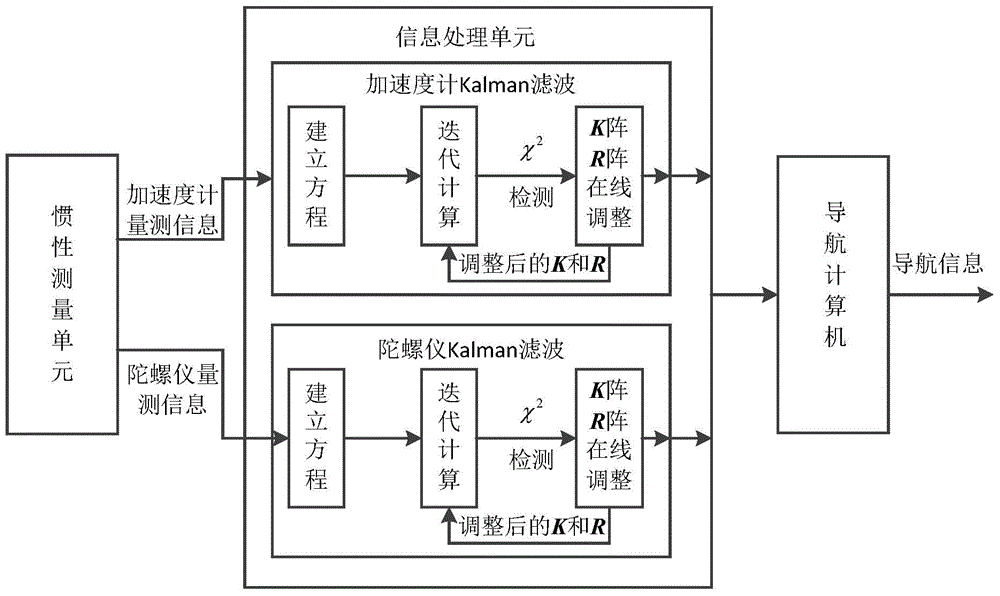
[0052] Such as figure 1 As shown, the real-time noise reduction system of accelerometer and gyroscope includes: inertial measurement unit, information processing unit, navigation computer, information processing unit includes: establishing equation module, iterative calculation module, online adjustment module, the accelerometer in the inertial measurement unit Detect the linear acceleration information of the carrier in the carrier coordinate system, the gyroscope detects the angular velocity information of the carrier in the inertial space, and convert the analog information detected by the accelerometer and gyroscope into digital information and transmit it to the information processing unit. The information processing unit passes Adjust the Kalman filter parameters online to process the detection information to obtain measurement information, and output it to the navigation computer; finally, the navigation computer uses the noise-reduced measurement information to perform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More