

Method for automatic collimation of cubic mirror based on machine vision
A technology of machine vision and cube mirror, which is applied to the interpretation of instruments, measuring instruments, and photos, etc., can solve the problems of not allowing, not being able to measure automatically, and not realizing the collimation and guiding function of the cube mirror, so as to reduce dependence and improve measurement efficiency and the effect of degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following introduces the specific implementation mode as the content of the present invention, and the content of the present invention will be further clarified through the specific implementation mode below. Of course, the following specific embodiments are described only to illustrate different aspects of the present invention, and should not be construed as limiting the scope of the present invention.
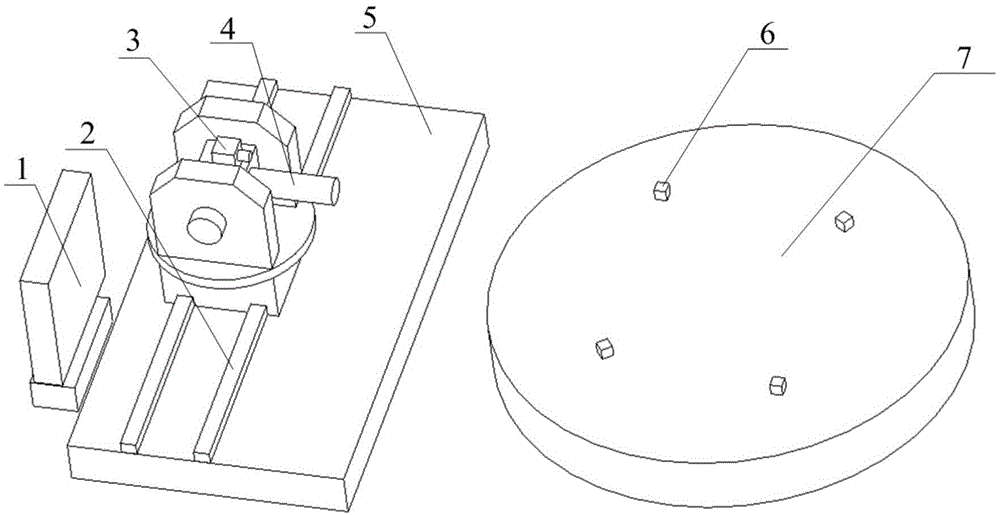
[0022] Such as figure 1 As shown, the automatic guidance system for cube mirror alignment measurement based on machine vision of the present invention includes: computer 1 for image processing and pose solution, precision guide rail 2, CCD camera 3, theodolite 4, motion control platform 5, waiting Measuring cube mirror 6 and high-precision turntable 7. Utilize camera 3 to carry out the pose measurement of cubic mirror 6 and realize the automatic guidance to the theodolite, mainly comprise the following steps:
[0023] (1) Installation between camera 3 and theod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More