

Pedestrian positioning method and system for tracking foot motion features
A technology of motion characteristics and positioning methods, applied in the direction of navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve the problems of low accuracy, instability, and inefficient calculation of zero speed detection, and improve detection efficiency and accuracy, solving the problem of misjudgment of the zero-speed interval and the problem of blurring the edge of the zero-speed interval, and taking into account the effect of calculation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
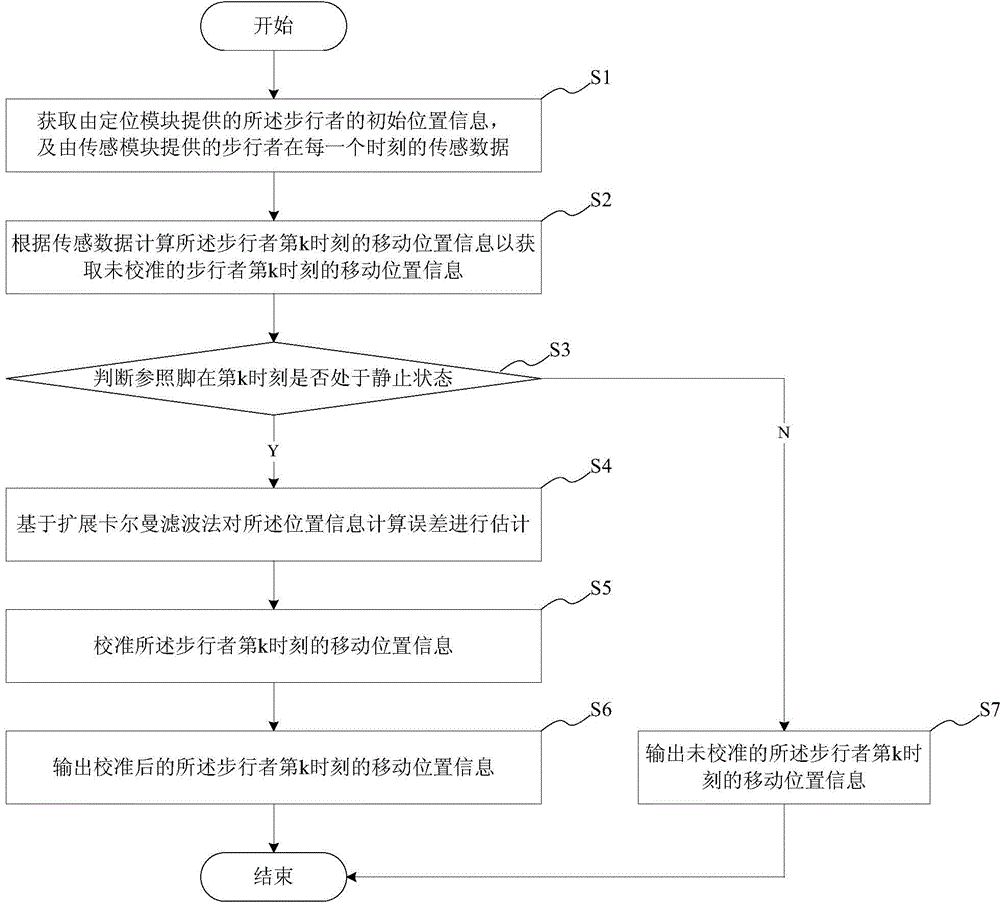
[0042] This embodiment provides a pedestrian positioning method for tracking the movement characteristics of the feet, which is implemented by a positioning module and a sensing module respectively worn on the upper body and feet of the pedestrian, wherein the sensing module includes a three-axis gyroscope, Three-axis accelerometer, three-axis magnetometer. Wherein, the three-axis gyroscope senses the angular velocity of the pedestrian at every moment, the three-axis accelerometer senses the acceleration of the pedestrian at every moment, and the three-axis magnetometer senses the pedestrian’s acceleration at every moment. of magnetic induction. see figure 1 , is shown as a flow diagram of the pedestrian localization method for tracking foot motion features. The walker positioning method of described tracking foot motion feature comprises the following steps:
[0043] S1. Obtain the initial position information of the pedestrian provided by the positioning module, and the s...
Embodiment 2
[0088] This embodiment provides a pedestrian positioning system 1 that tracks the motion characteristics of the feet, and performs tracking pedestrian positioning through a positioning module and a sensing module that are respectively worn on the upper body and feet of the pedestrian, wherein the sensing module Including three-axis gyroscope, three-axis accelerometer, three-axis magnetometer. see Figure 4 , is shown as a schematic structural diagram of a pedestrian positioning system for tracking foot motion features. The pedestrian positioning system for tracking foot movement features includes: sensing module 11, positioning module 12, data acquisition module 13, preprocessing module 14, calculation module 15, judgment module 16, estimation module 17, calibration module 18, the second An output module 19 and a second output module 20 .
[0089] In this embodiment, the three-axis gyroscope, three-axis accelerometer, and three-axis magnetometer are integrated on the sensing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More