

Push force measurement device for endovascular interventional surgery robot
A technology of interventional surgery and measuring device, applied in the field of measuring device of interventional surgery robot, can solve the problems of insufficient resolution of pushing force measurement, problems in clamping method, difficulty in disinfection and sterilization, etc., so as to facilitate the rapid replacement of corresponding catheters Operation, easy one-time use, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
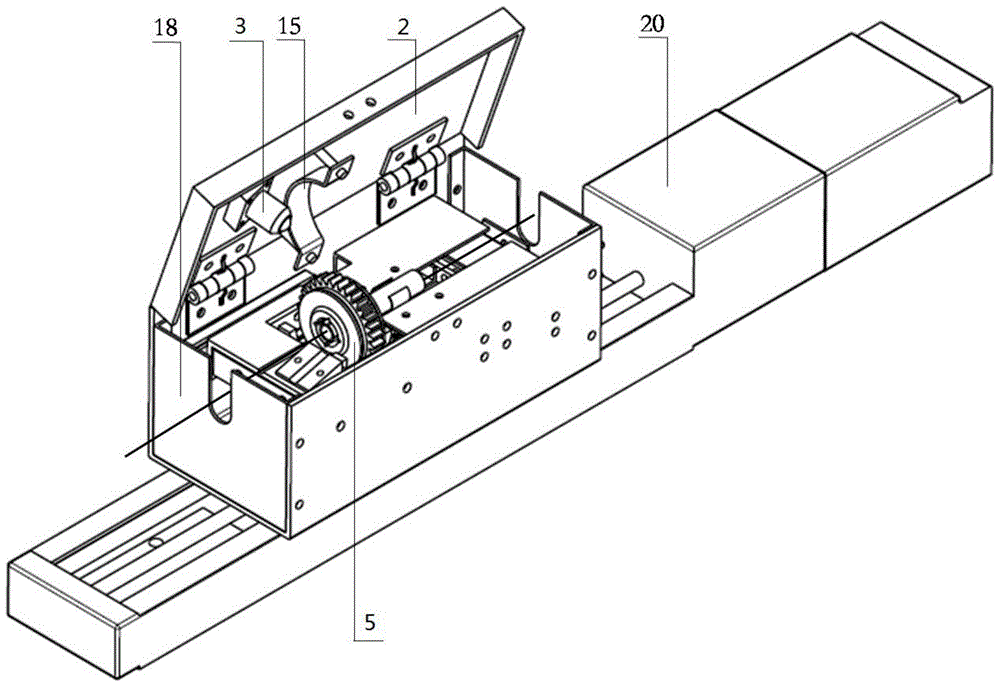
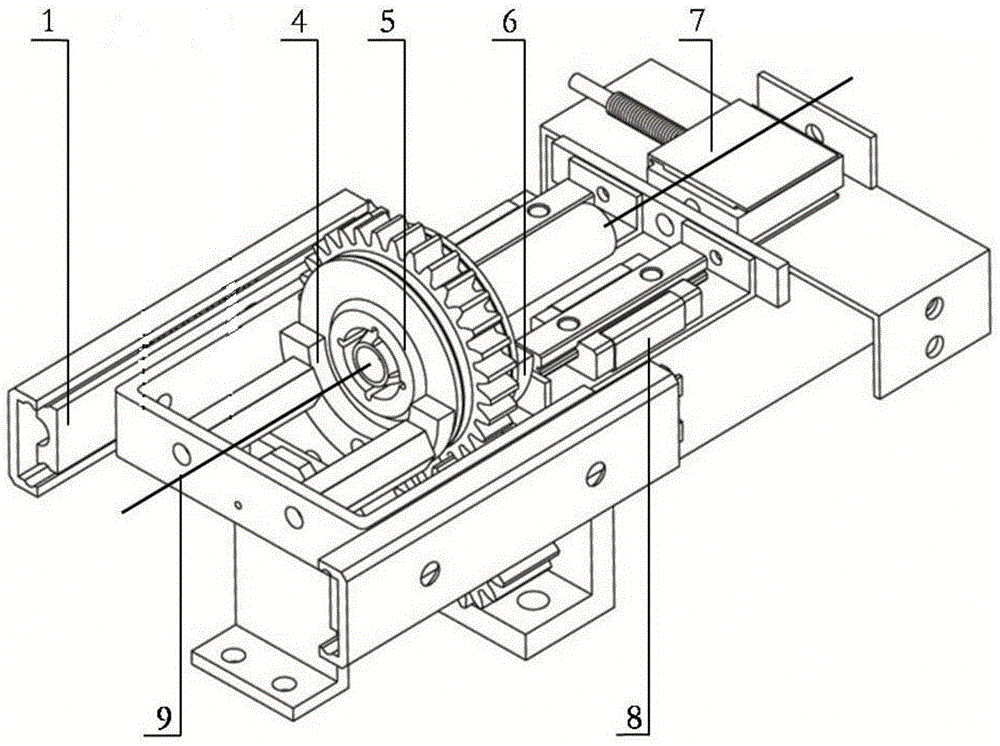
[0021] See attached figure 1 , 2 , a push force measurement device for an intravascular interventional robot, comprising: a linear drive assembly 20 , a base 18 , a guide wire 9 , a force sensor 7 , a guide wire twister, a motor 11 and a drive auxiliary part 5 .
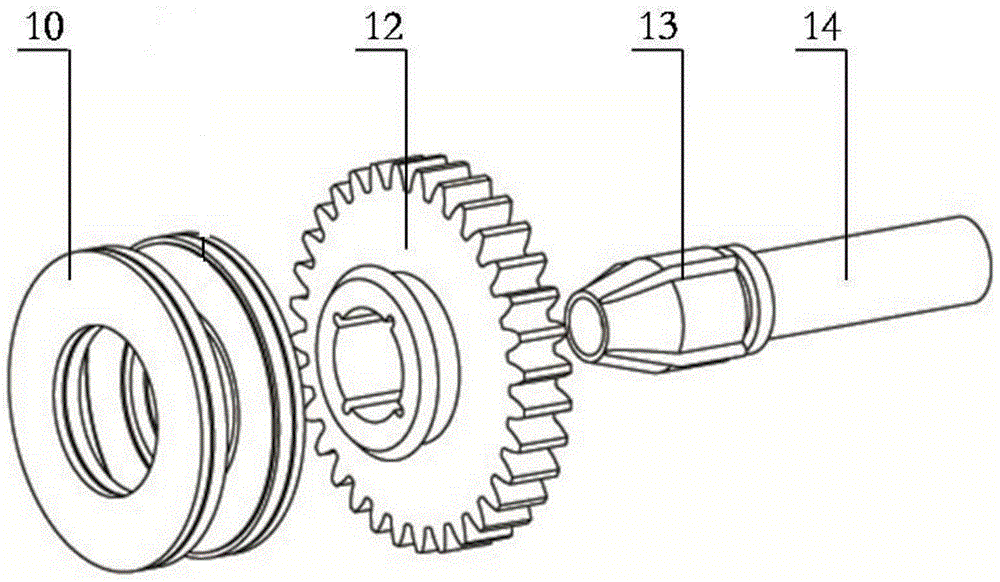
[0022] See attached image 3 , The guide wire twister includes a knob 13 and a handle 14 with a central hole, and the knob 13 and the handle 14 are coaxially connected by threads. The guide wire 9 passes through the center hole of the formed guide wire twister, and is fixedly connected by the chuck in the center hole of the handle 14;
[0023] The guide wire driving auxiliary part 5 comprises: column gear 12, needle roller thrust bearing 10, driving wheel 16 and idler wheel 17; needle roller thrust bearing 10 is installed on both sides of column gear 12, the head of knob 13 (not c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More