

Shaft hole assembly industrial robot system and working method thereof
A technology of industrial robots and shaft holes, which is applied in manipulators, metal processing, manufacturing tools, etc., can solve problems such as failures in assembly operations, inability to complete assembly of assembly parts, failure of assembly operations, etc., and achieve the effect of high assembly accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
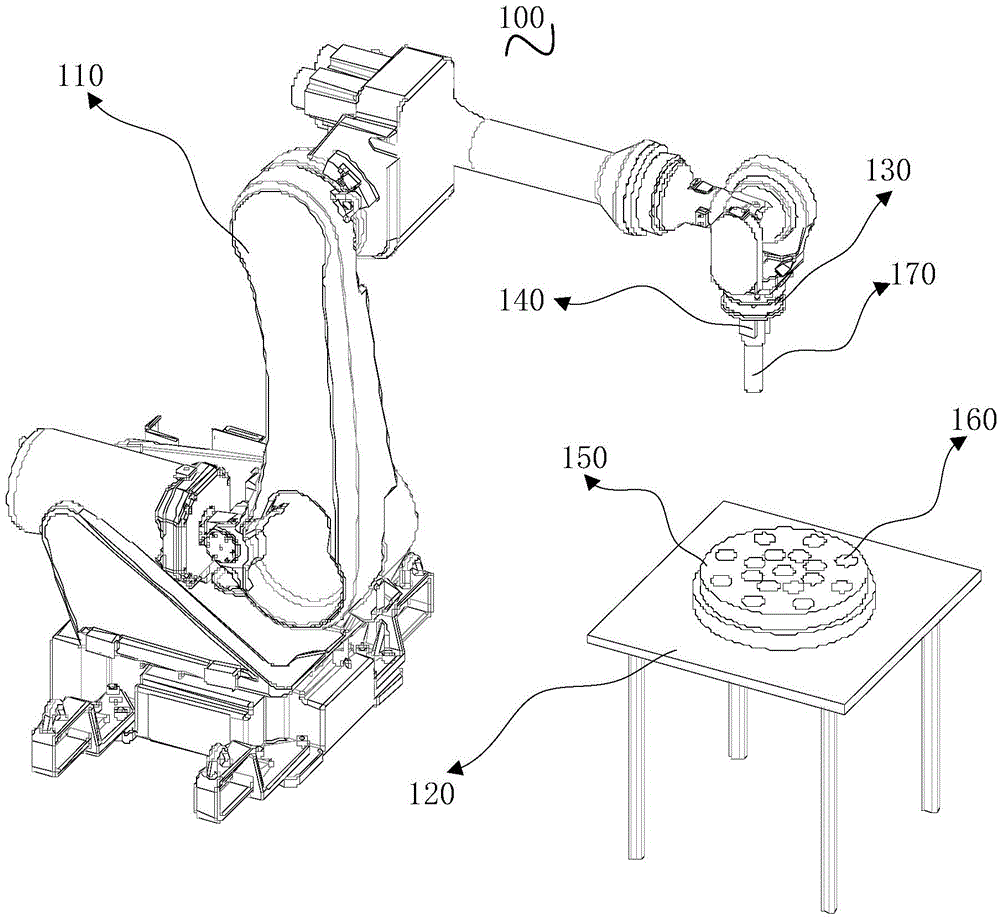
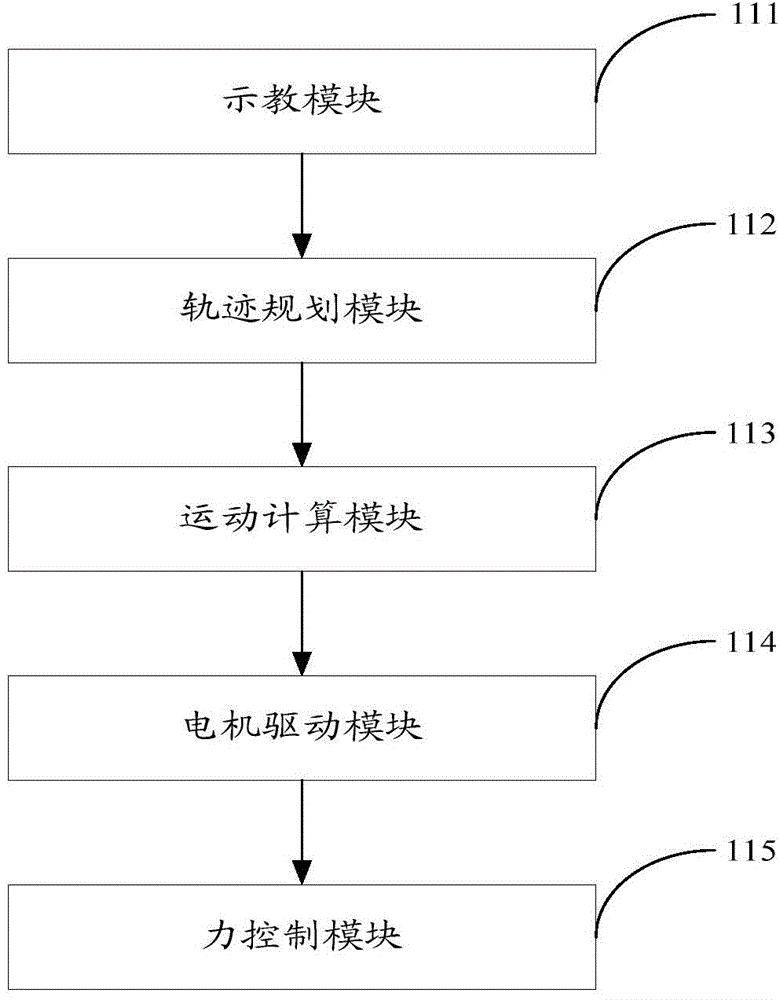
[0041] see figure 1 and figure 2 , figure 1 A schematic structural view of the shaft hole assembly industrial robot system 100 provided by the present invention, figure 2 It is a functional schematic diagram of an industrial robot provided by an embodiment of the present invention. Shaft hole assembly industrial robot system 100 includes:
[0042] Industrial robot 110, shaft hole assembly platform 120, force sensor 130, clamping device 140, assembly workpiece 150, assembly hole 160 and assembly shaft 170, industrial robot 110 includes teaching module 111, trajectory planning module 112, motio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More