

Method for automatically locating and moving binocular vision mechanical arm for weight testing
A technology of automatic positioning and binocular vision, applied in the field of robotics, can solve the problems of weighing equipment damage, low efficiency, and inability to accurately guarantee the quality of verification work, and achieve the effects of avoiding impact hazards, reducing labor costs, and improving verification efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
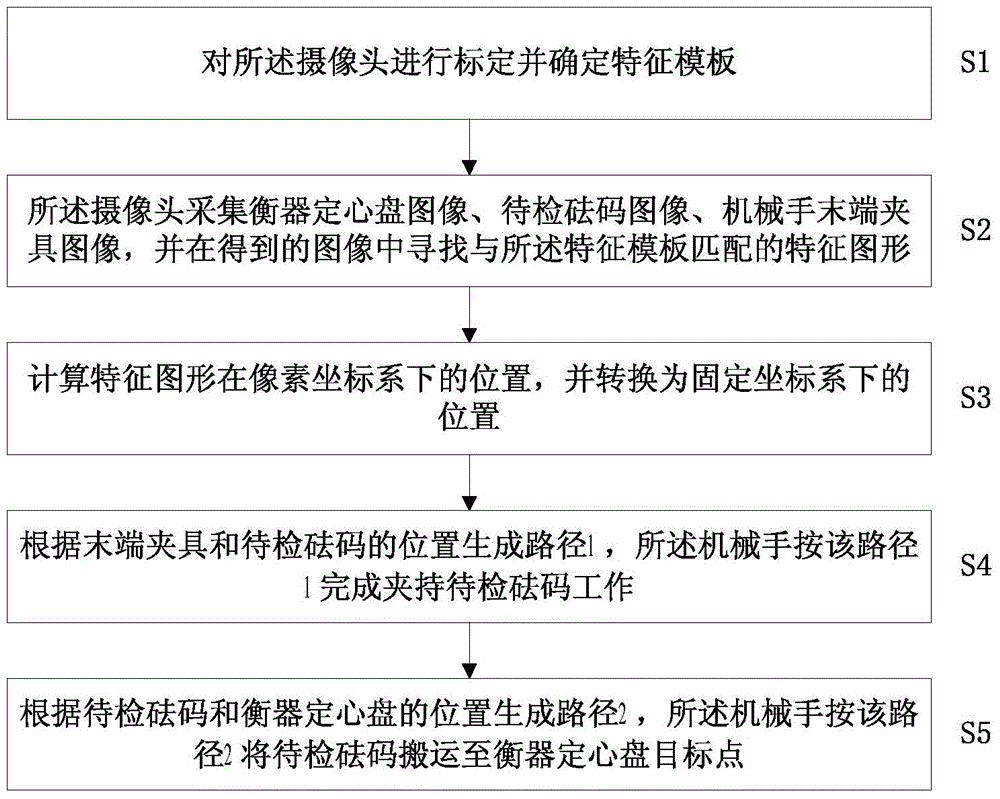
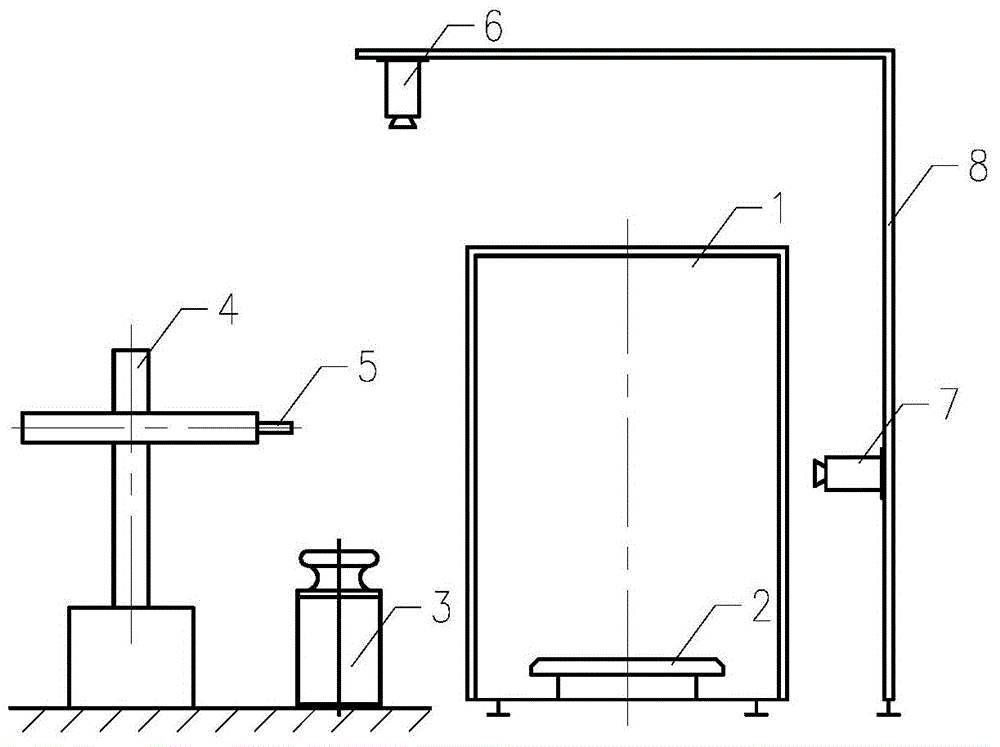
[0032] refer to figure 1 , the binocular vision manipulator automatic positioning and moving method for weight verification of the present embodiment includes the following steps:
[0033] Step S1, performing calibration on the camera and determining a feature template;
[0034] Step S2, the camera collects images of the centering plate of the weighing apparatus, the weight to be inspected, and the clamp at the end of the manipulator, and searches for a characteristic pattern matching the characteristic template in the obtained image;
[0035] Step S3, calculating the position of the feature figure in the pixel coordinate system, and converting it to the position in the fixed coordinate system of the manipulator system;
[0036] Step S4, generating a planned path 1 according to the position of the gripper at the end of the manipulator and the pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More