Blanking feature constraining calibrating method and device for binocular vision sensor
A binocular vision and calibration method technology, applied in the field of computer vision, can solve problems such as large calculation errors, high calculation complexity, and difficulty in guaranteeing, and achieve the goal of reducing difficulty and complexity, simple and effective calibration process, and easy processing and manufacturing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
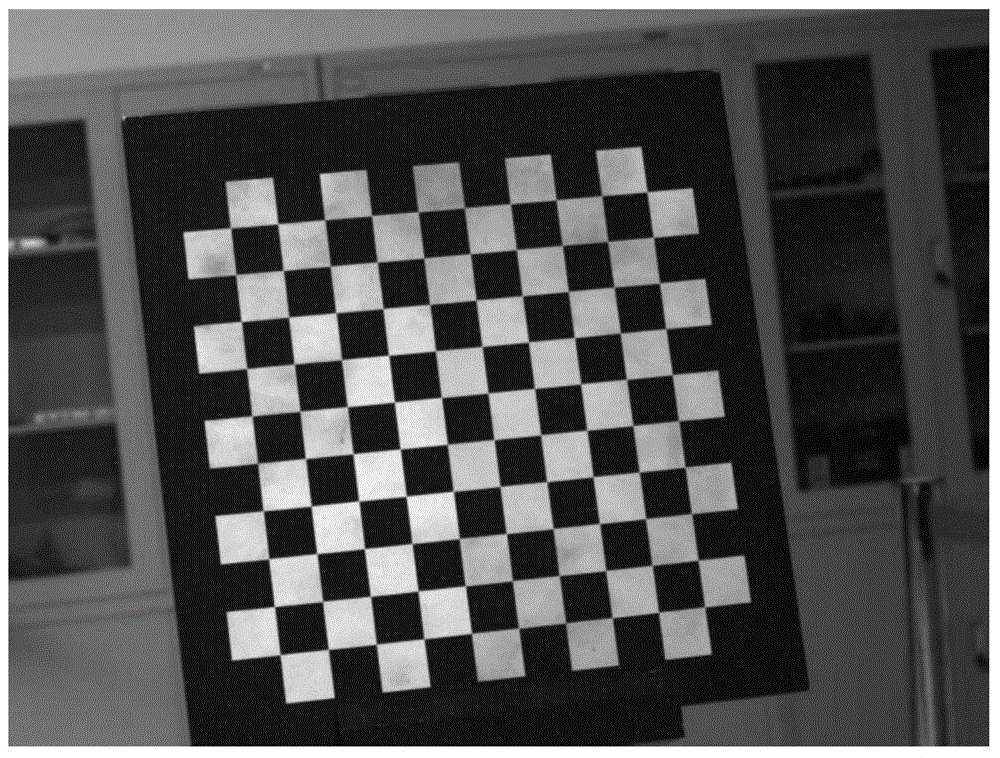
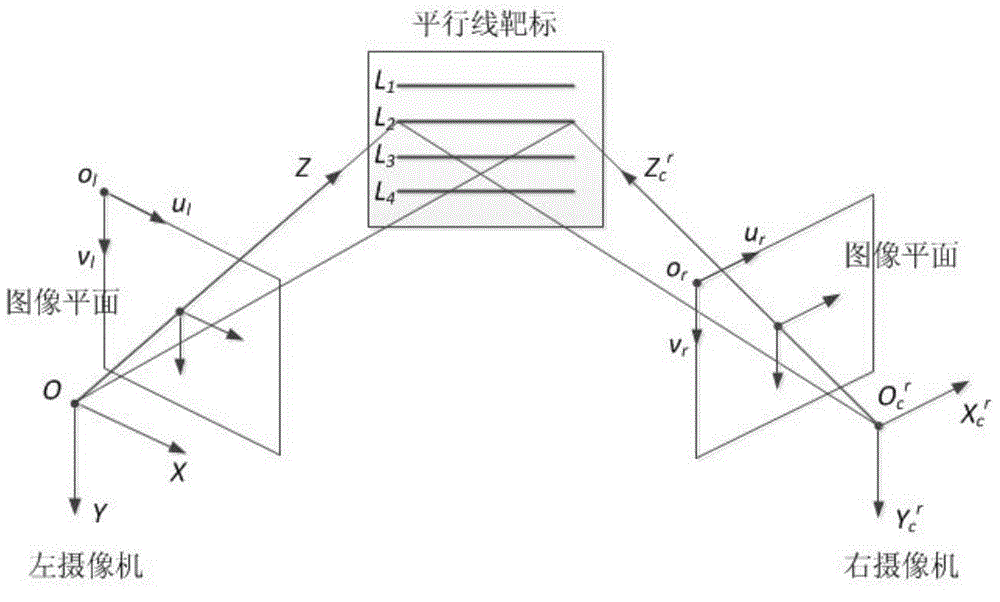
[0029] The basic idea of the present invention is: take the parallel line target as the calibration object, freely place it at least twice in the measurement space of the binocular vision sensor, and obtain multiple target images by two cameras. Extract at least 3 feature lines from each image to calibrate the structural parameters of the binocular vision sensor.
[0030] The present invention will be further described below in conjunction with accompanying drawing.
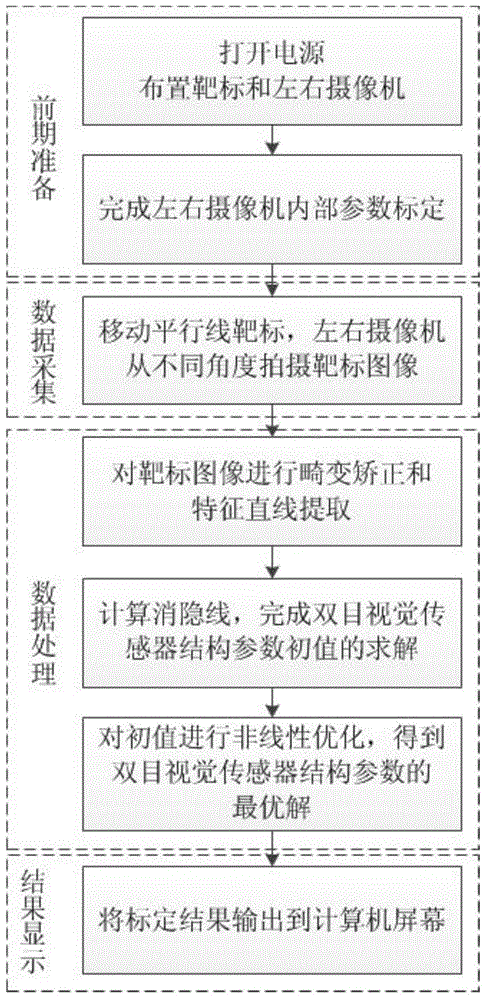
[0031] figure 1 It is a flow chart of the method for calibrating the blanking feature constraint of a binocular vision sensor of the present invention, such as figure 1 As shown, a kind of blanking feature constrained calibration method of binocular vision sensor of the present invention comprises the following steps:
[0032] Step 1: According to the measurement object, fix the position of the left and right cameras. Use the method described by Zhang Zhengyou in the article "A flexible new technique for cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com