Design method of IMU digital filter for inertial navigation system
An inertial navigation system and digital filtering technology, applied in the IMU data processing field of the inertial navigation system, can solve the problems of simulation model establishment without knowledge reserve, simulation model and realization of code non-homology, manpower consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
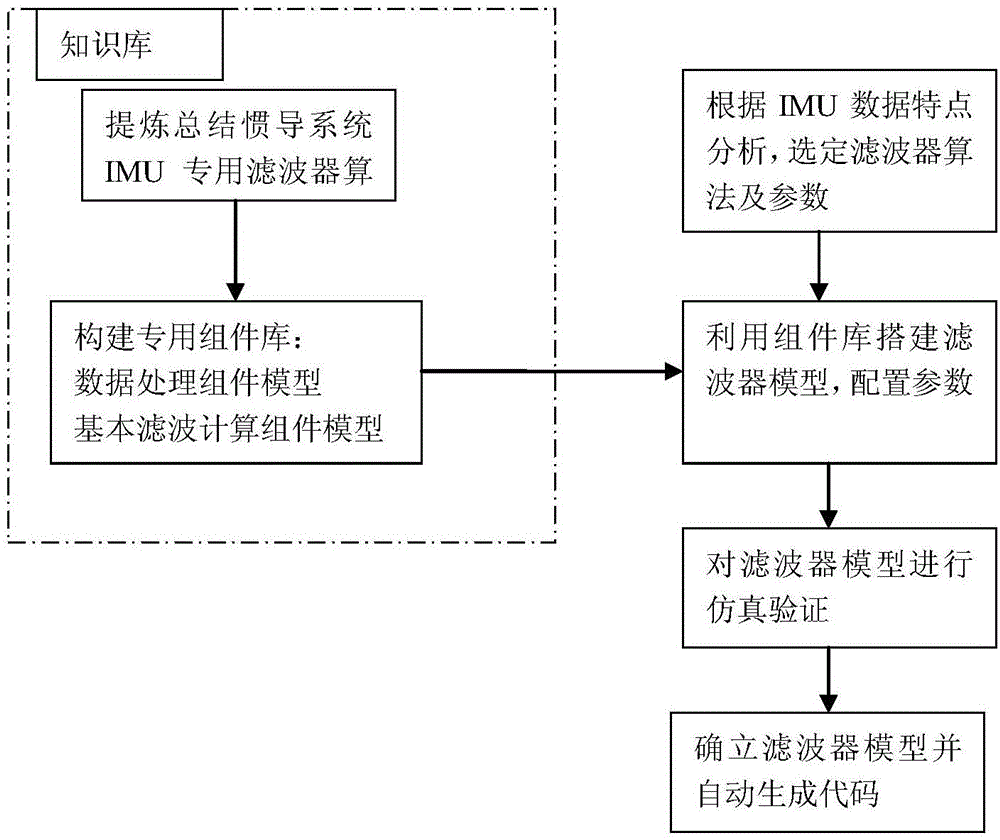
[0030] The following describes the design process of a digital filter dedicated to a certain type of IMU in conjunction with the attached drawings:
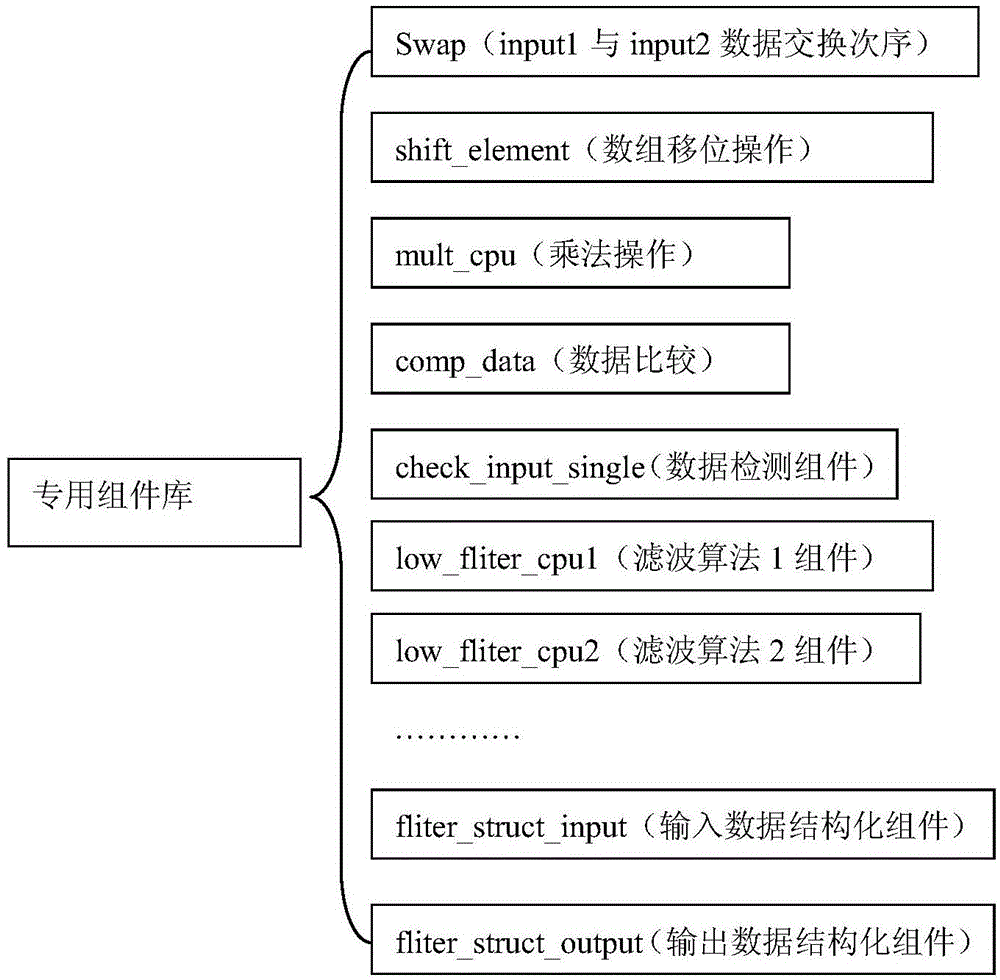
[0031] 1. According to the low-pass digital filtering algorithm and data processing characteristics used in the IMU special digital filter of the inertial navigation system, the modeling design method is used to establish such figure 2 The IMU-specific digital filter component model library shown. It includes data transposition, data shift, data multiplication, data comparison, input data detection and other data processing component models, and a special digital filtering algorithm model (low_fliter_cpu1) for the IMU of the inertial navigation system; the model algorithm is this The output value of the secondary filter is equal to the sum of multiplying the latest N+1 sets of data by the B0~Bn parameters, and then subtracting the sum of the multiplication of the output values of the previous N beats by the A1~An parameters. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More