

A robot flexible drive rotary joint with adjustable mechanical impedance parameters
A technology of mechanical impedance and rotating joints, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problem of limited vibration reduction effect, and achieve the effect of convenient installation, strong vibration reduction ability, and reduction of vibration force amplitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in conjunction with the accompanying drawings.
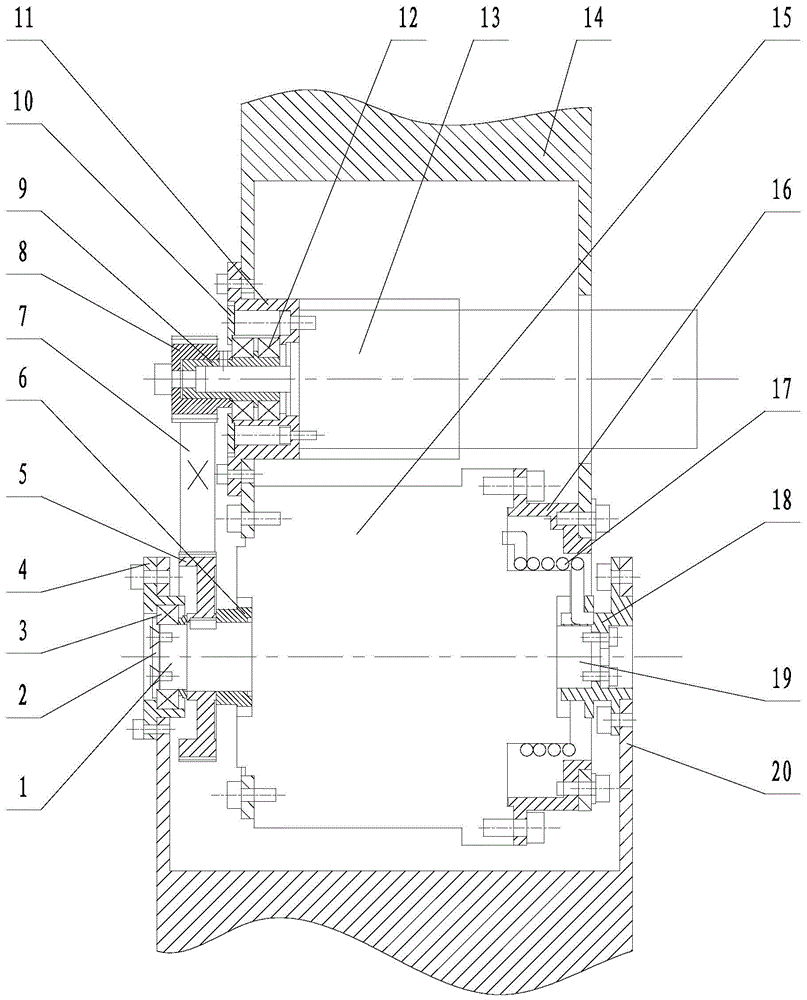
[0014] Such as figure 1 As shown, the present invention comprises magneto-rheological clutch 15, motor 13, transmission mechanism, first rod 20, second rod 14, torsion spring 17 and joint shaft end cover 18, wherein magnetorheological clutch 15 and motor 13 are respectively installed on 14 on the second pole.
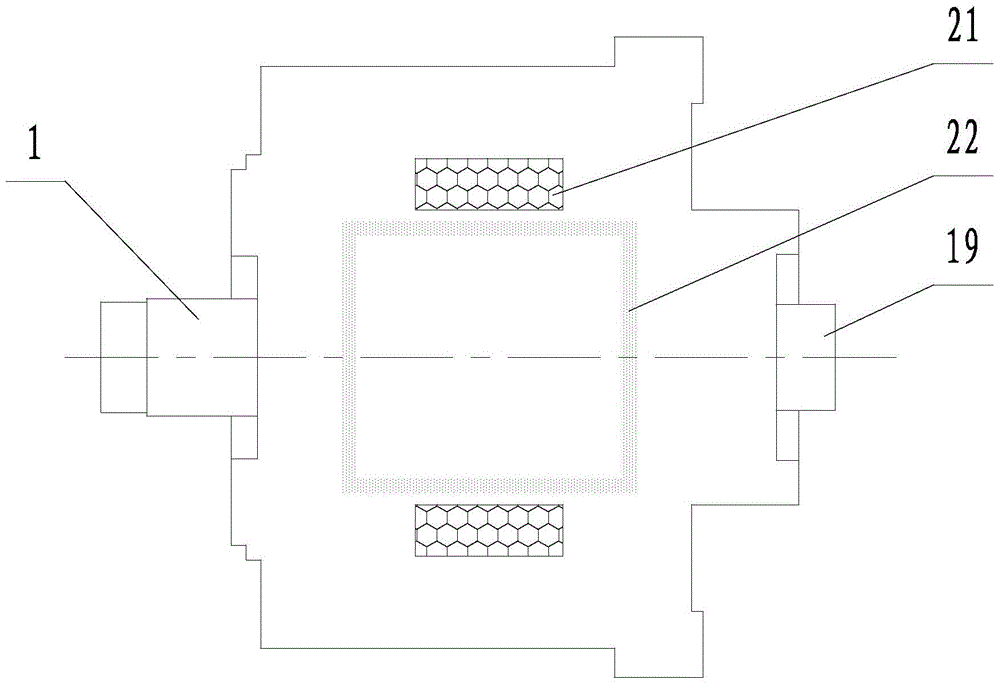
[0015] Such as figure 2 As shown, the magneto-rheological clutch 15 includes a magneto-rheological clutch input shaft 1, a coil 21, a magneto-rheological fluid 22, a magneto-rheological clutch output shaft 19 and a housing, one side of the housing and one side of the second rod 14 The magneto-rheological clutch connecting end cover 16 is fixedly connected to the other side of the housing by screws, and the magneto-rheological clutch connecting end cover 16 is fixed to the other side of the second rod 14 by screws. The magneto-rheological clutch inp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More