

Force feedback surgical robot control system based on augmented reality
A surgical robot and augmented reality technology, used in surgery, medical science, diagnosis, etc., can solve the problems of doctors' imaging, inability to intuitively obtain three-dimensional positioning and accurate tactile positioning of diseased tissue, and increase potential risks, and achieve the goal of improving operation accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
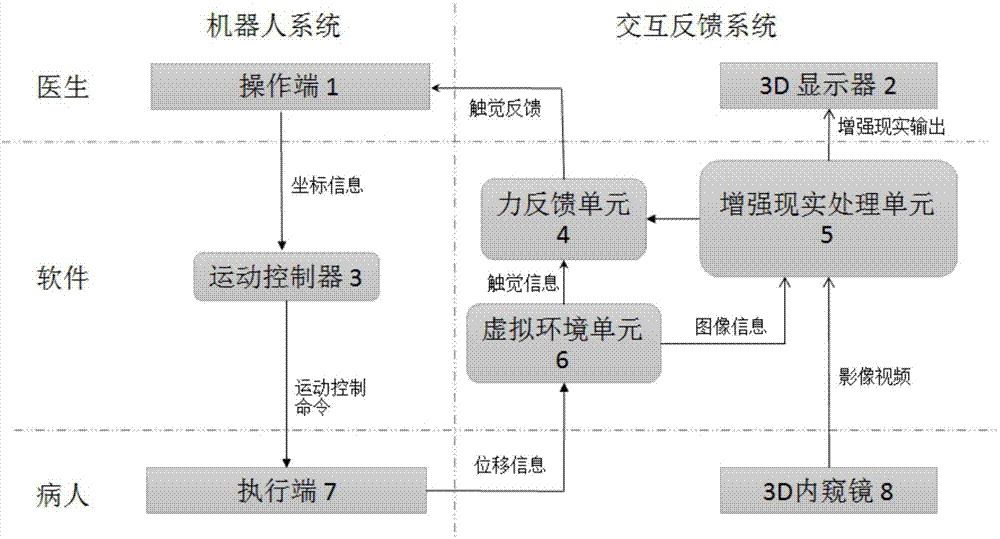
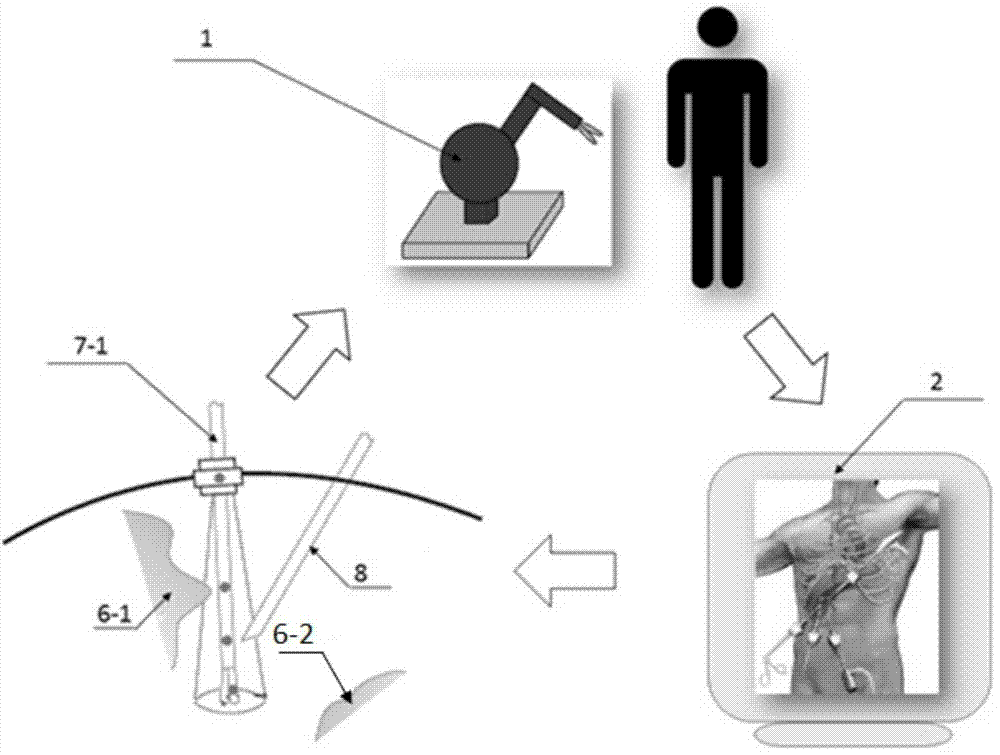
[0018] The present invention provides a force feedback surgical robot control system based on augmented reality, such as figure 1 As shown, the system mainly includes a force feedback interactive system and a motion control system at the execution end of the surgical robot; the system specifically includes an operation end 1, a 3D display 2, a motion controller 3, an augmented reality processing unit 5, a virtual environment unit 6, an execution end 7 and 3D endoscope 8;
[0019] The operation terminal 1 sends coordinate information to the motion controller 3; the motion controller 3 sends motion control commands to the execution terminal 7; the execution terminal 7 sends displacement information to the virtual environment unit 6; the virtual environment unit 6 sends images The information is sent to the augmented reality processing unit 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More