

Mechanical arm kinematics formal analysis method
An analysis method and a technology of a manipulator, applied in the field of manipulators, can solve problems such as inaccurate results and complex calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
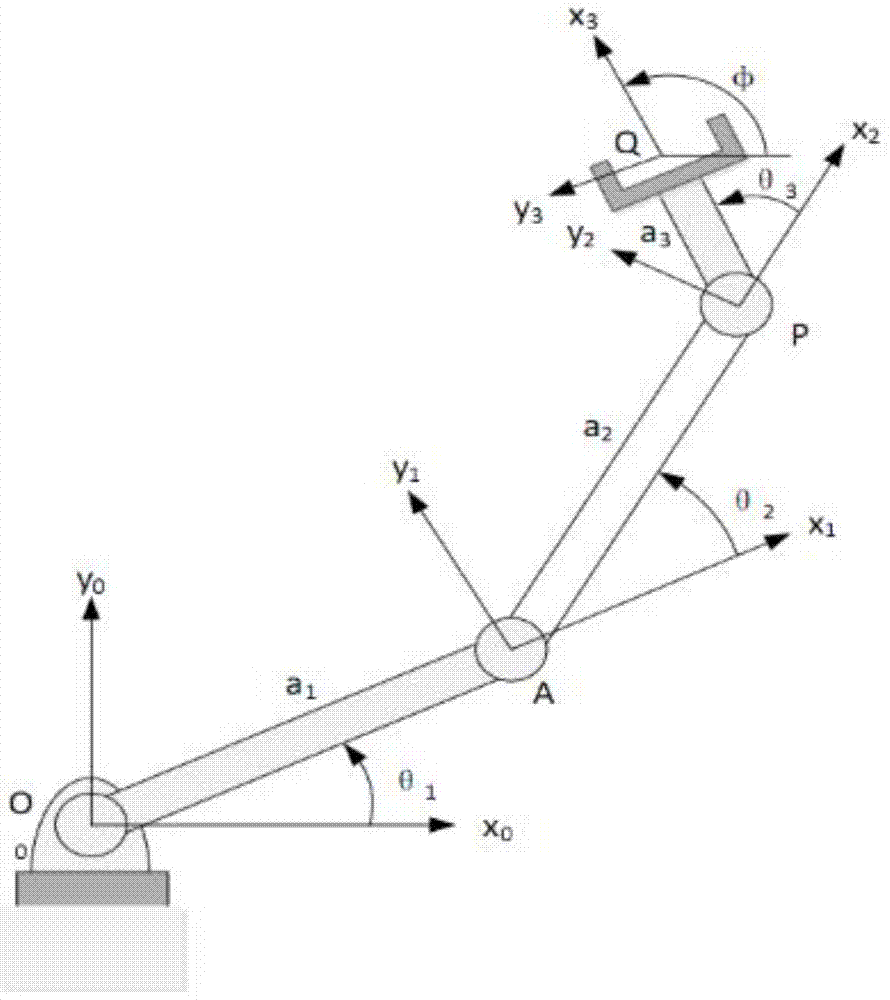
[0121] In this embodiment, the formalized analysis method of the kinematics of the manipulator in this application is specifically described by taking a plane 3-DOF manipulator as an example.
[0122] Such as figure 1 The D-H parameters of the shown planar 3-DOF manipulator are shown in Table 1:
[0123] Table 1 D-H parameters of the planar 3-DOF manipulator
[0124] the joint
α i
a i
d i
θ i
1
0
a 1
a 1
θ 1
2
0
a 2
a 2
θ 2
3
0
a 3
a 3
θ 3
[0125] In Table 1, α i Indicates the torsion angle between the rotation axes of each revolving pair, a i Indicates the offset distance (connecting rod length) between two adjacent revolving pairs, d i Indicates the distance between the vertical feet of the common normal between the rotation axes of two adjacent revolving pairs, θ i Indicates the angle of rotation of the revolving joint.
[0126] Determine the screw coordinates...
Embodiment 2
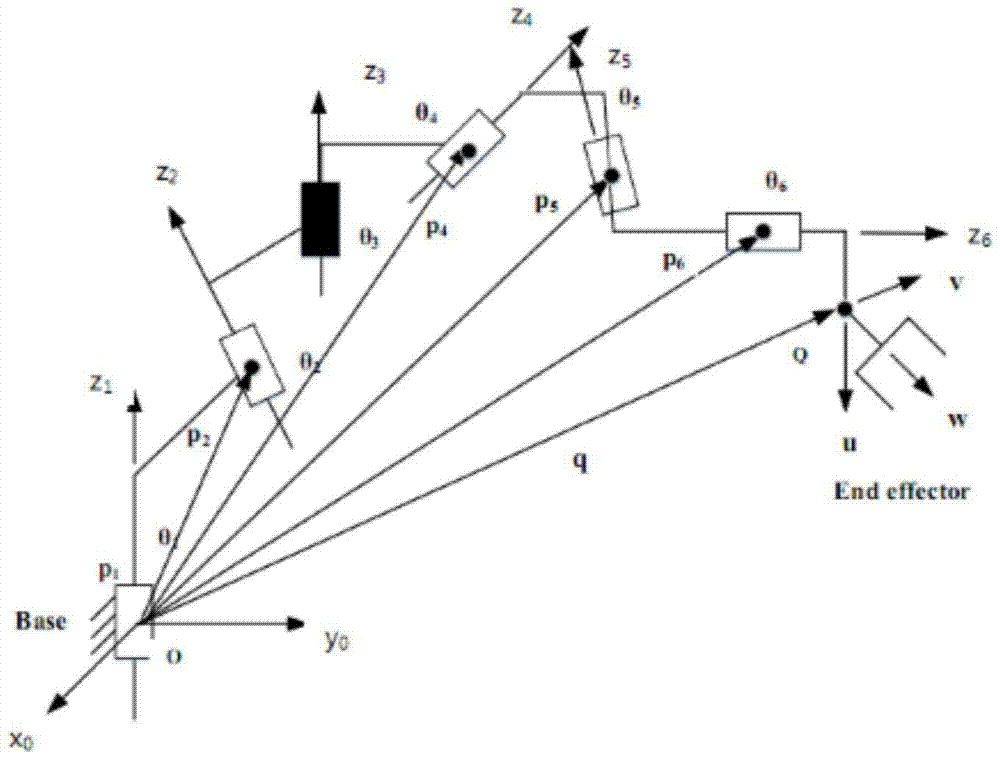
[0182] In this embodiment, a singular configuration of a 6R robot is used for judgment
[0183] image 3 It shows a state diagram of a 6R robot in a singular configuration, in which the black-marked rotary joint is in a singular configuration, and the mechanism has the following special parameters:
[0184] the joint
z i
θ i
d i
1
(0,0,1) T
any angle
1
2
(0,1,0) T
0
1
3
(0,0,1) T
any angle
1
4
Take any
any angle
1
5
Take any
any angle
1
6
Take any
any angle
1
[0185] Table 2 A singular configuration parameter of the 6R robot
[0186] Table 2, z i respectively represent the rotation axes of each joint of the mechanism, θ i Indicates the rotation angle of each joint of the mechanism, d i Indicates the connecting rod length.
[0187]
[0188] in, represents the primordial part of the spinor, Represents the even part of the sc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More