

Combined navigation method based on INS (inertial navigation system)/GPS (global position system)/SAR (synthetic aperture radar)
A joint navigation and GPS receiver technology, applied in the field of target recognition and navigation information, can solve the problems of small drone body, GPS signal is easily interfered, and low flight altitude, and achieves fault tolerance and poor autonomy. And strong anti-interference, improve the effect of fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
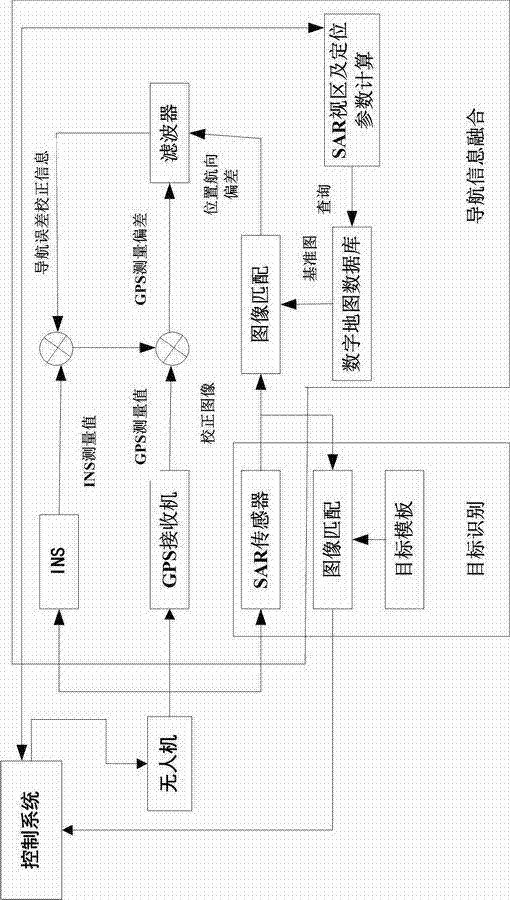
[0021] Such as figure 1 Shown, a kind of INS / GPS / SAR-based joint navigation method of the present invention comprises the following steps,
[0022] (1) Install the INS, GPS receiver and SAR sensor in parallel to the appropriate position on the UAV; the INS / GPS / SAR integrated navigation system consists of two parts: target recognition and navigation information fusion; the target recognition part consists of target templates, Composed of image matching and SAR sensor; the navigation information fusion part is composed of INS, GPS receiver, SAR sensor, image matching, digital map database, SAR viewing area and positioning parameter calculation, and filter; among them, the digital map database stores the flight area terrain height information, location information of obstacle target points, threat area information, and landmark information;
[0023] (2) Match the corrected SAR real-time image with the map corresponding to the SAR surveying area queried from the digital map datab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More