

Prediction function control method for PMSM servo system
A predictive function control and servo system technology, applied in the control system, control generator, vector control system, etc., can solve the problem of not considering the sudden change of rotor load disturbance, the deterioration of the control performance of the servo system, and the inability to eliminate the influence of the sudden change of rotor load disturbance, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The accompanying drawing discloses a non-restrictive structural schematic diagram of a preferred embodiment involved in the present invention, and the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
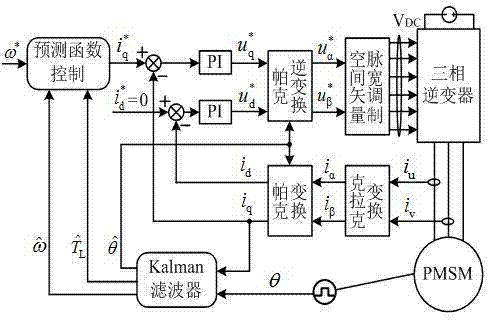
[0037] Such as figure 1 As shown, it discloses a system block diagram of a predictive function control method for a PMSM servo system according to the present invention, which uses a photoelectric encoder to collect the position signal θ of the PMSM servo motor. The photoelectric encoder is installed inside the motor, and at the same time The current signal of the motor is collected by the Hall current sensor u i v , and apply Clarke transform and Parker transform to get i d i q , the motor position signal θ, motor current signal i q Feedback to the Kalman filter, use the Kalman filter to observe the rotor load torque, rotor speed and rotor position, and feed back the observation results to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More