

Indoor and outdoor personal navigation algorithm based on INS/GPS (inertial navigation system/global position system) integration of MEMS (micro-electromechanical system)
A navigation algorithm and detection algorithm technology, which is used in navigation, navigation, mapping and navigation through speed/acceleration measurement, which can solve the problem of high-precision navigation that cannot meet long-distance or long-term navigation, increased navigation error, and alignment time. long and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
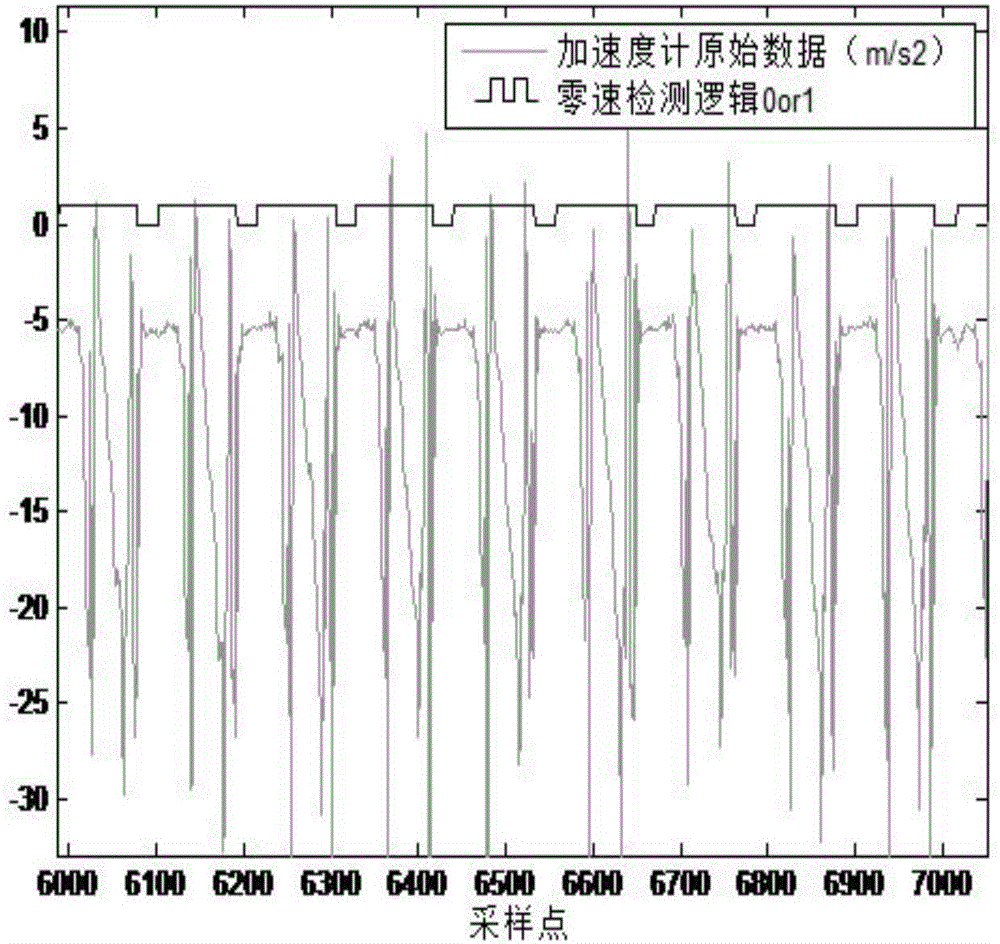
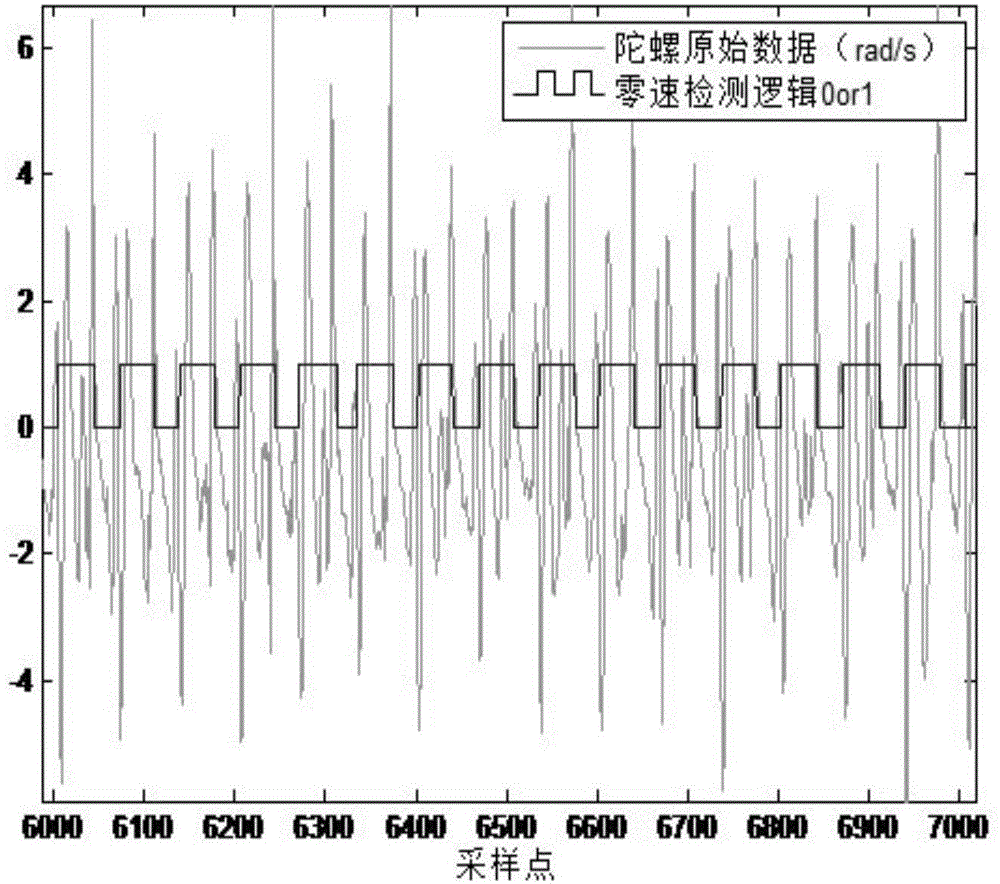
[0062] 1. Such as figure 2 As shown, the curve waveform is the original change curve of the x-axis acceleration, and the rectangular wave is the zero-speed detection waveform obtained by the zero-speed detection method of self-adjusting the threshold when people are walking normally; image 3 As shown, the curve waveform is the original change curve of the x-axis gyro, and the rectangular wave is the zero-speed detection waveform obtained by the zero-speed detection method of self-adjusting the threshold during human running; the sampling period is 100HZ, and the more zero-speed intervals are detected in the same time , The faster the speed, it can be seen from the figure that the running speed is about twice that of the walking time, and the zero-speed detection method with self-adjusting threshold has a good detection effect on the asynchronous mode.
[0063] 2. The MEMS-based inertial measurement unit used in this experiment is the MTI-G-700 long-range sensor produced by Xsens ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More