

A walking guide device and method for a building wall construction robot
A technology of crawler walking device and robot, which is applied in the direction of construction and building construction, can solve the problems of large measurement errors, and achieve the effect of simple structure, high walking speed and high positioning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
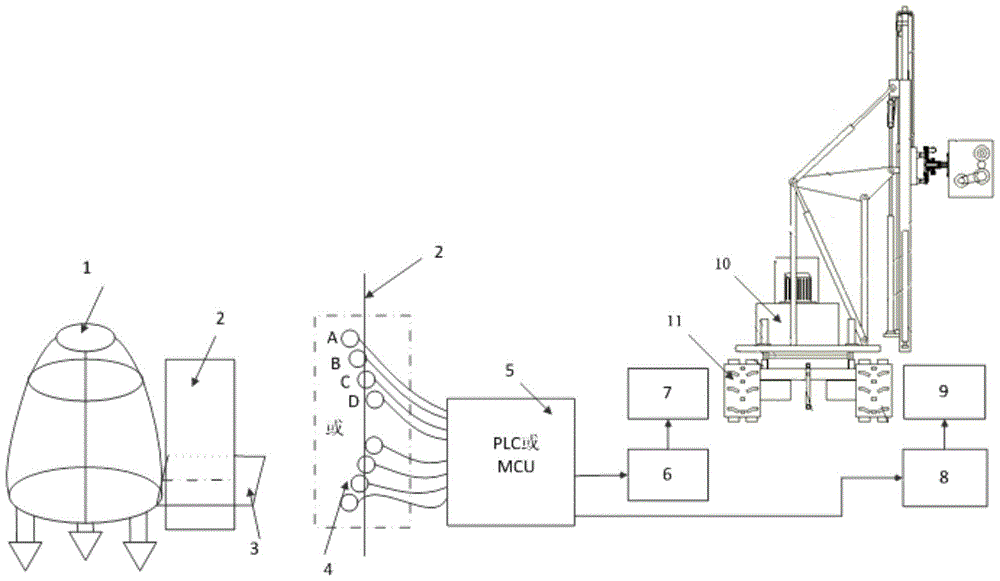
[0021] Such as figure 1 As shown, the walking guide device of the building wall construction robot places horizontal and vertical laser reflectors 1 in the construction area according to the wall construction requirements, and the emitters form a vertical reference plane 2 and a horizontal reference plane 3 according to specific needs. Both sides of the building wall construction robot 10 are equipped with crawler running devices 11, the left crawler running device is connected to the left motor 7, and the right crawler running device is connected to the right motor 9, and is installed on one side or both sides of the building wall construction robot. The photoelectric switch combination 4 on the crawler walking device 11 forms the position signal during the walking process of the building wall construction robot. In practical applications, the photoele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More