

DELTA parallel manipulator and DELTA parallel robot
A manipulator and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of small torque, limited working stroke of manipulators, slow response speed of output shaft, etc., to achieve large torque, fast response speed, and working stroke range big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
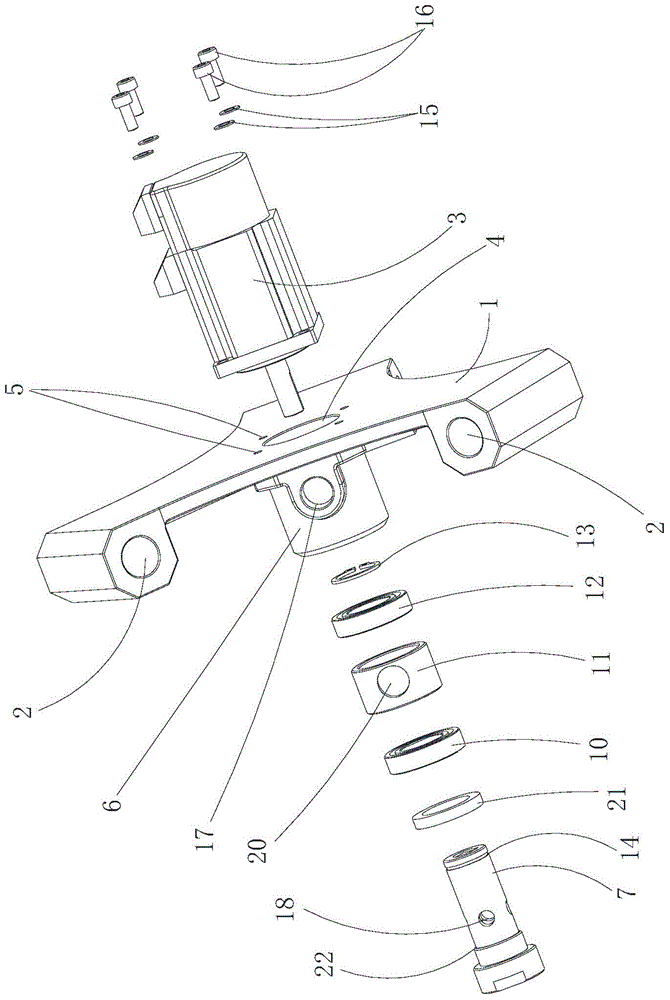
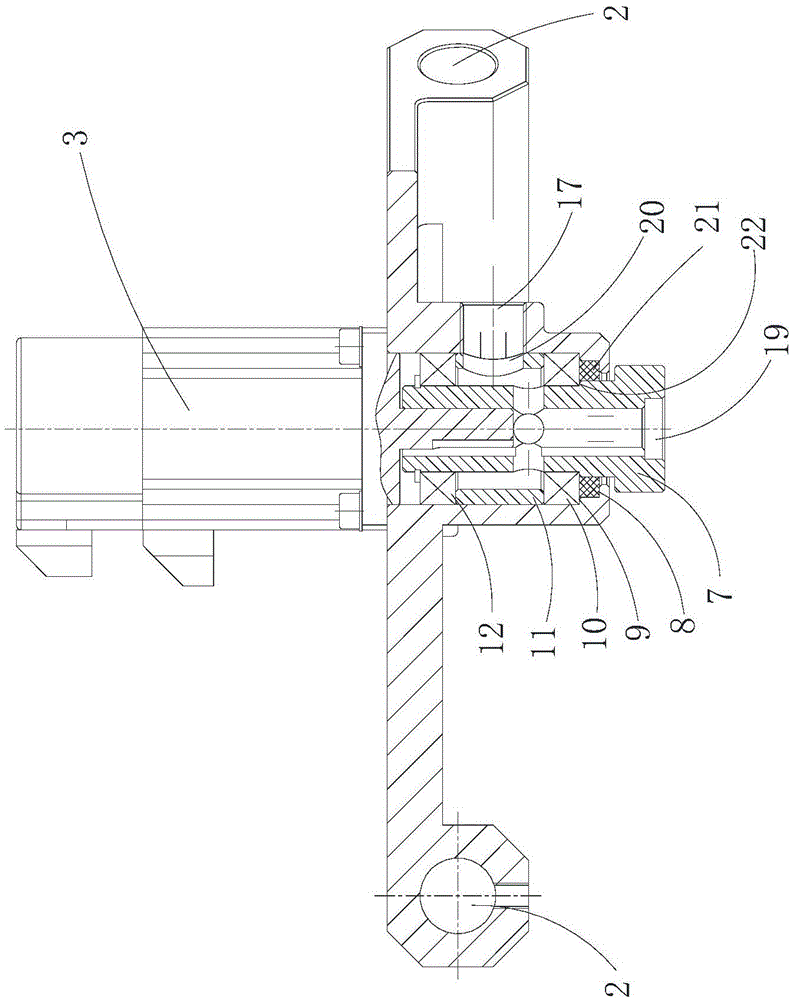
[0021] The invention provides a DELTA parallel manipulator, which includes a flange-shaped moving platform; three hinged holes are arranged symmetrically on the side of the moving platform; a protruding hole for the output shaft of the motor to pass through is provided in the middle of the moving platform. hole; the mounting hole of the motor is provided around the protruding hole; the motor is arranged on the upper part of the moving platform and is screwed with the moving platform through the mounting hole; on the moving platform A shaft sleeve is provided at the lower part of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More