

Exoskeleton type finger motion function rehabilitation machine
A technology of motor function and rehabilitation machine, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of unable to achieve precise control of multiple joints, adding CPM devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with accompanying drawing, the present invention is described in further detail, so that those skilled in the art understand:
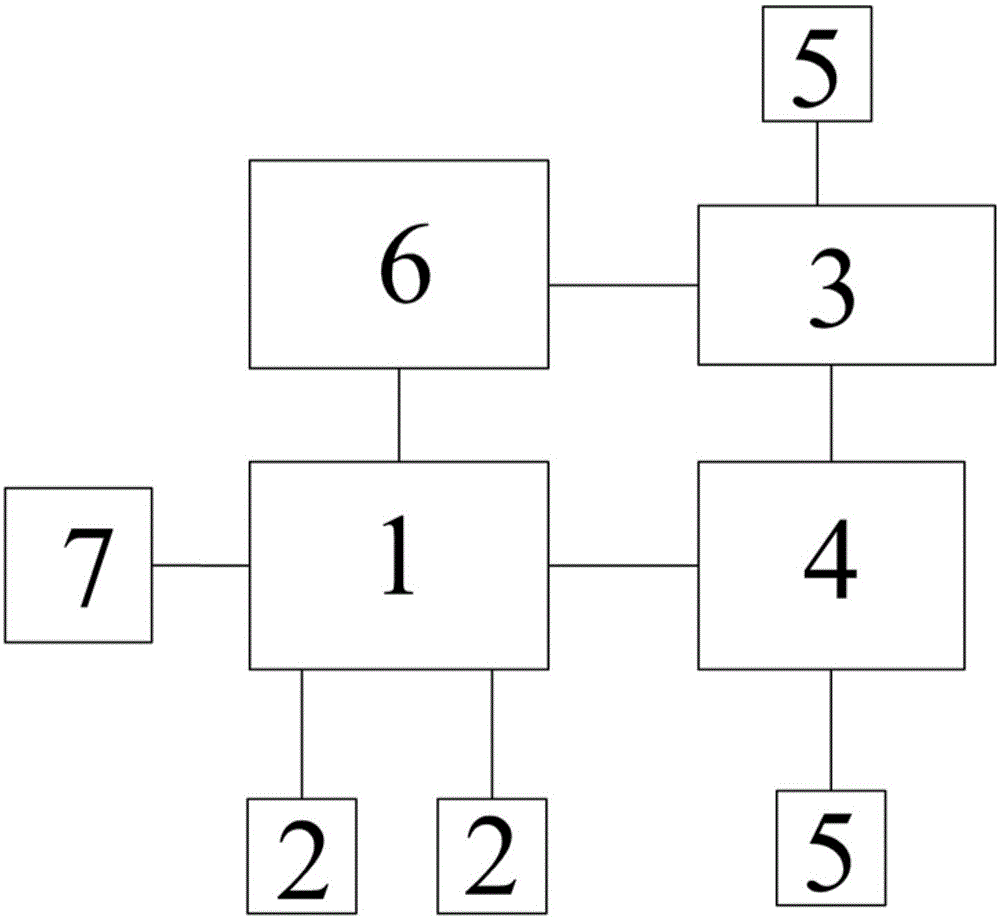
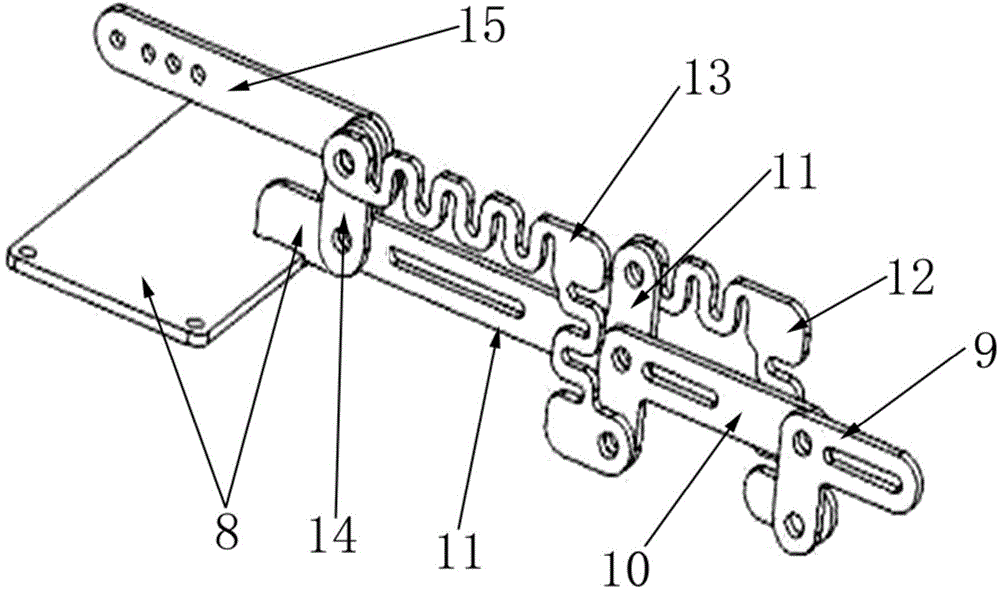
[0026] see Figure 1-2 As shown, this embodiment provides an exoskeleton type finger motor function rehabilitation machine, which is mainly composed of three parts: input and display, mechanical transmission and control system.
[0027] In the control system, it mainly includes controller 1, sensor 2 and switch 5. In this embodiment, the Huishuo single-chip microcomputer is used as the controller 1, and the acquired information is saved and selected for transmission. The number of sensors 2 is two, using a position sensor, one of which is used to control the deflection angle of the first joint, which is the joint that imitates the connection between the hand and the fingers, and the other is used to control the initial position of the joint. The number of switches is two, one controls the power supply 3 and the other cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More