

Autonomic barrier-crossing system for wheel-track transformer station inspection robot and control method thereof
An inspection robot and robot technology, which is applied in two-dimensional position/channel control and other directions, can solve the problems of low operation efficiency of crawler robots, inability to apply substation inspection robots, and difficulty in meeting the requirements of efficient robot inspection, etc. Compact, precise control, and easy to expand effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
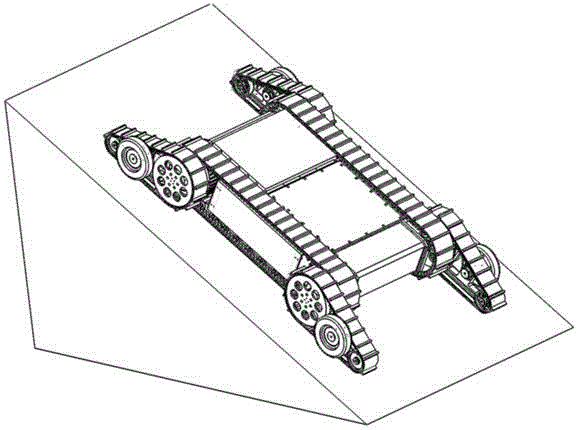
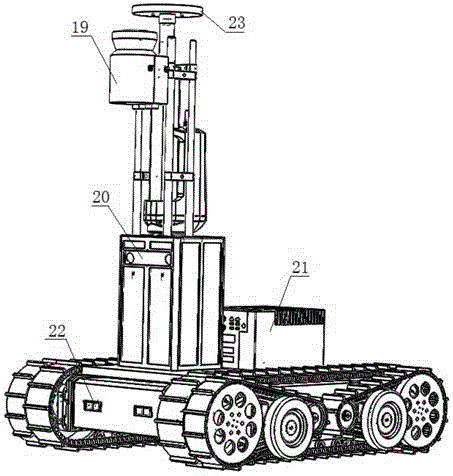
[0077] A four-arm wheel-track composite robot chassis includes a robot control box (17), a crawler walking unit, a wheel walking unit, an obstacle-crossing arm unit and a driving motor. Wherein the crawler walking unit comprises a left walking crawler (4) and a right walking crawler (16) installed on both sides of the control box. The wheeled traveling unit comprises two left traveling wheels (1) and two right traveling wheels (18). The obstacle-surmounting support arm unit includes two front support arms (8) installed at the front end of the control box body and two rear support arms (13) installed at the rear end of the control box body. The drive motors include a left travel drive motor (7), a right travel drive motor (12), a front support arm drive motor (10) and a rear support arm drive motor (2).
[0078] Wherein, walking wheel is installed on the front support arm (8) and the rear support arm (13) respectively. The two traveling wheels installed on the front support a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More