

Multi-robot cooperation control system
A collaborative control and multi-robot technology, applied in the general control system, control/regulation system, digital control, etc., can solve the problems of large error accumulation of odometer technology, GPS accuracy problem, unsuitable for indoor use, etc., to achieve flexible movement ability, The effect of less interference from interference factors and rich image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
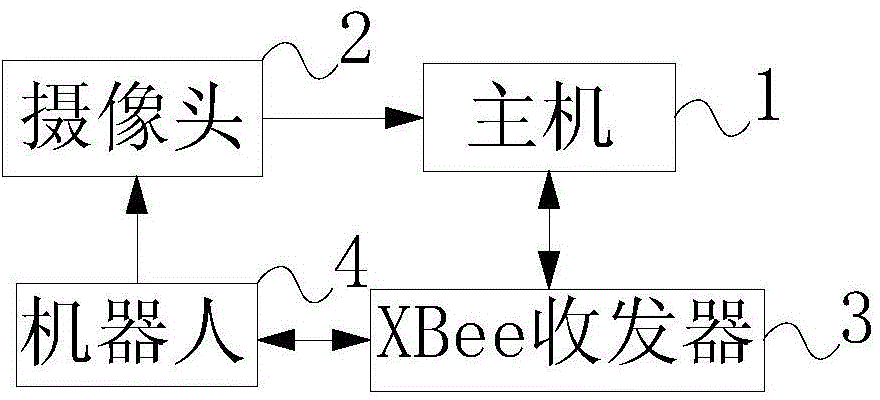
[0026] This embodiment provides a multi-robot cooperative control system, which includes a host 1 , a camera 2 , an XBee transceiver 3 and a plurality of robots 4 .
[0027] The host 1 is a computer, and of course it can also be an industrial computer.
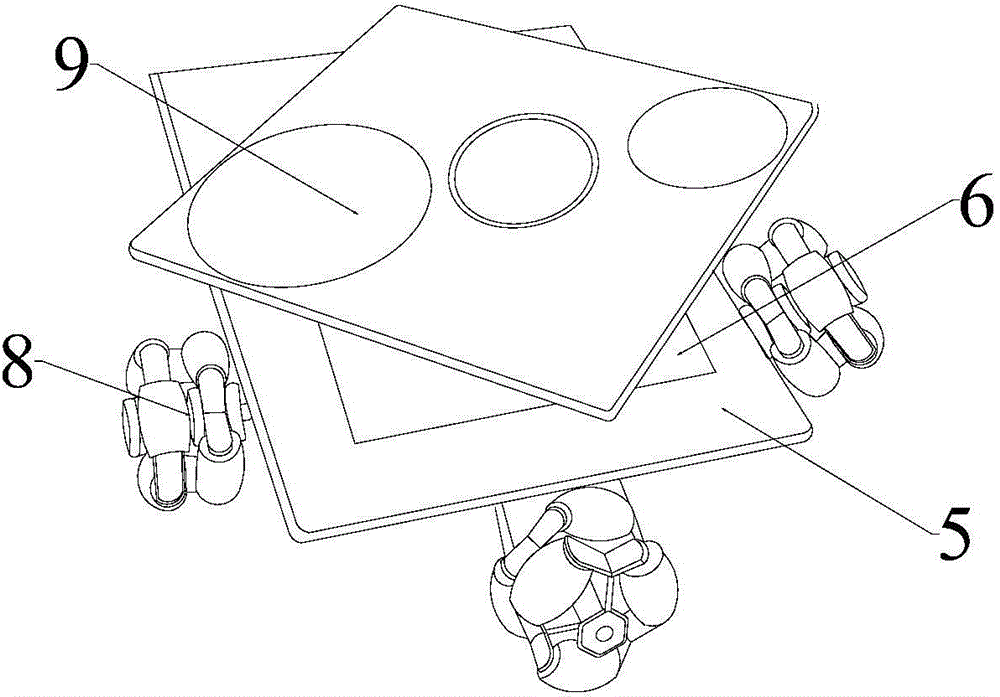
[0028] The robot 4 is a four-wheel omnidirectional mobile robot, and the plurality of robots 4 are distributed in the same working plane.
[0029] The camera 2 is connected to the host 1, and is used to transmit the image taken by it to the host, and the host receives the image, and processes the image to obtain the position of the robot; in this embodiment, the camera It can be installed on a fixed object above the plurality of robots, so that the images taken by the camera include all the robots; in this embodiment, the camera is a USB camera with a resolution of 640*480, and the camera has Good camera effect, simple connection with the host, easy to arrange and move, low cost and other advantages. In a multi-robot system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More