

SCARA robot accurate positioning method based on granularity model
A granular model and robot precision technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as deviations and errors between actual points and expected points, and achieve the effect of ensuring effectiveness, precise positioning, and single parameter adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific implementation cases and with reference to the accompanying drawings.
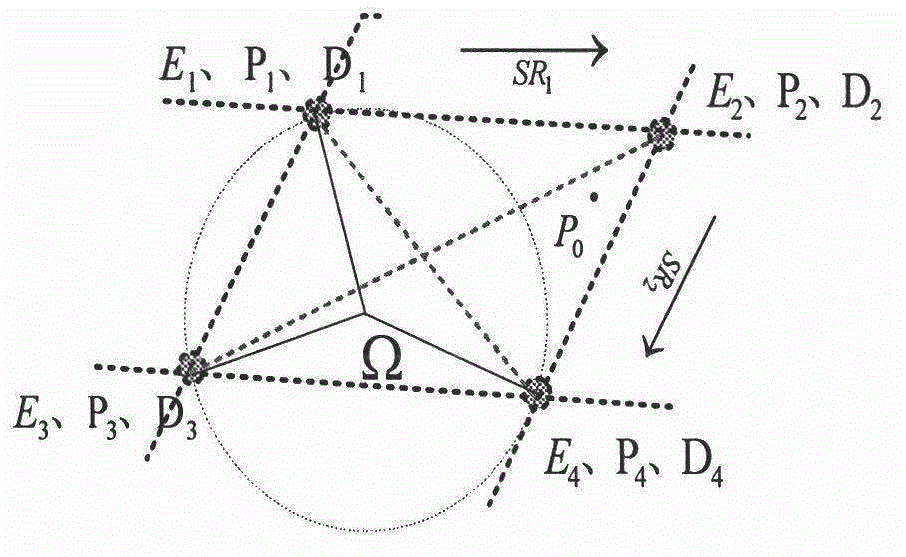
[0022] The basic idea of the present invention is to propose a SCARA robot precise positioning method based on the granularity model combined with the principle of minimum distance error approximation. Determine the initial granularity model parameters, calculate the distance error between the granularity point and the expected point, and determine the granularity model parameter adjustment strategy.
[0023] For further explanation, the specific implementation steps are:
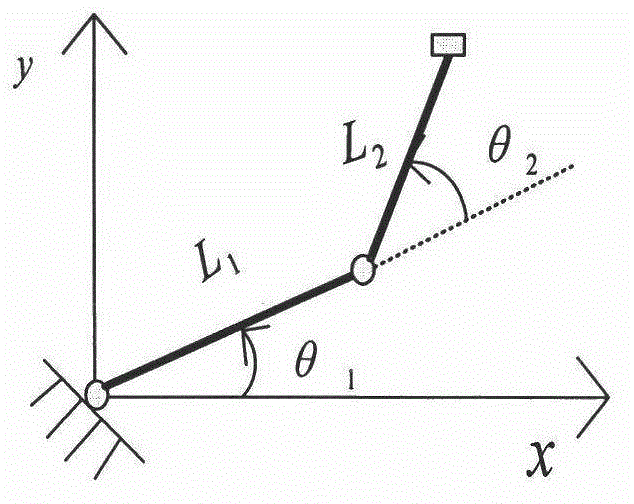
[0024] (1) Construct a simplified model of the 1-axis and 2-axis of the robot.
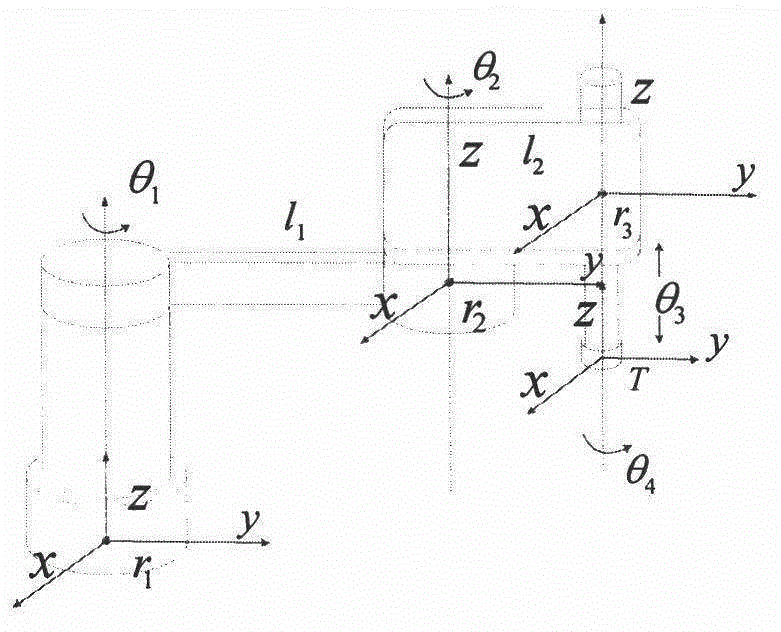
[0025] attached figure 1 It is a SCARA robot model diagram, and the positioning of the SCARA robot on the plane depends on the 1-axis θ 1 with 2 axis θ 2 j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More