

Extensible-connection six-freedom-degree force feedback mechanical arm
A force feedback, robotic arm technology, applied in the field of 6-DOF force feedback robotic arms, can solve the problems of large moment of inertia and equipment impedance, no gravity balance design, no extended connection design, etc., to achieve balanced self-weight and response Sensitive, slip-free effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
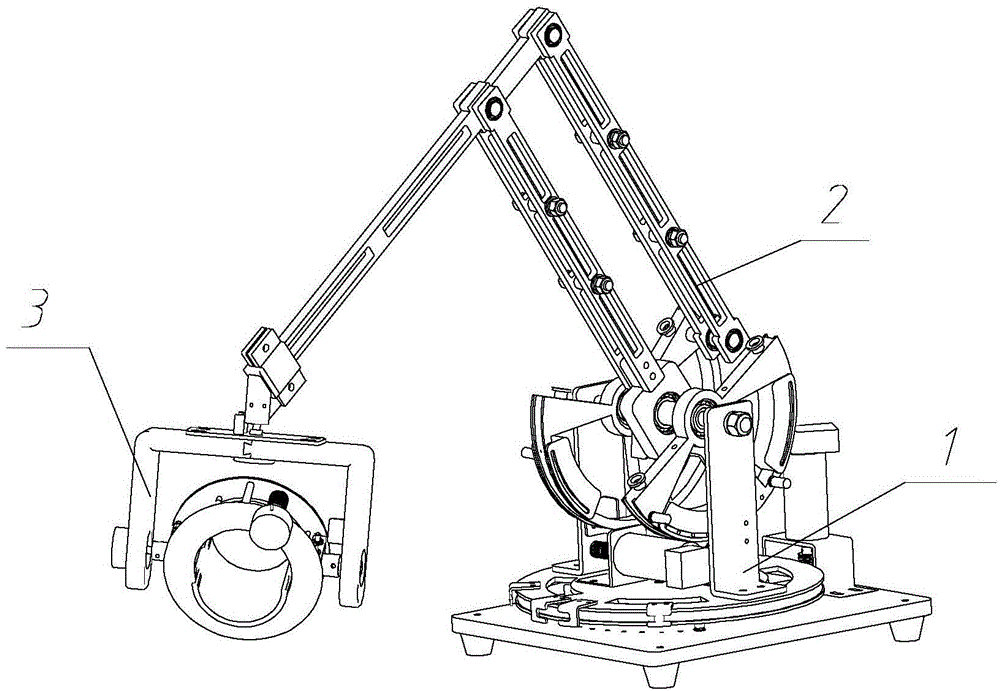
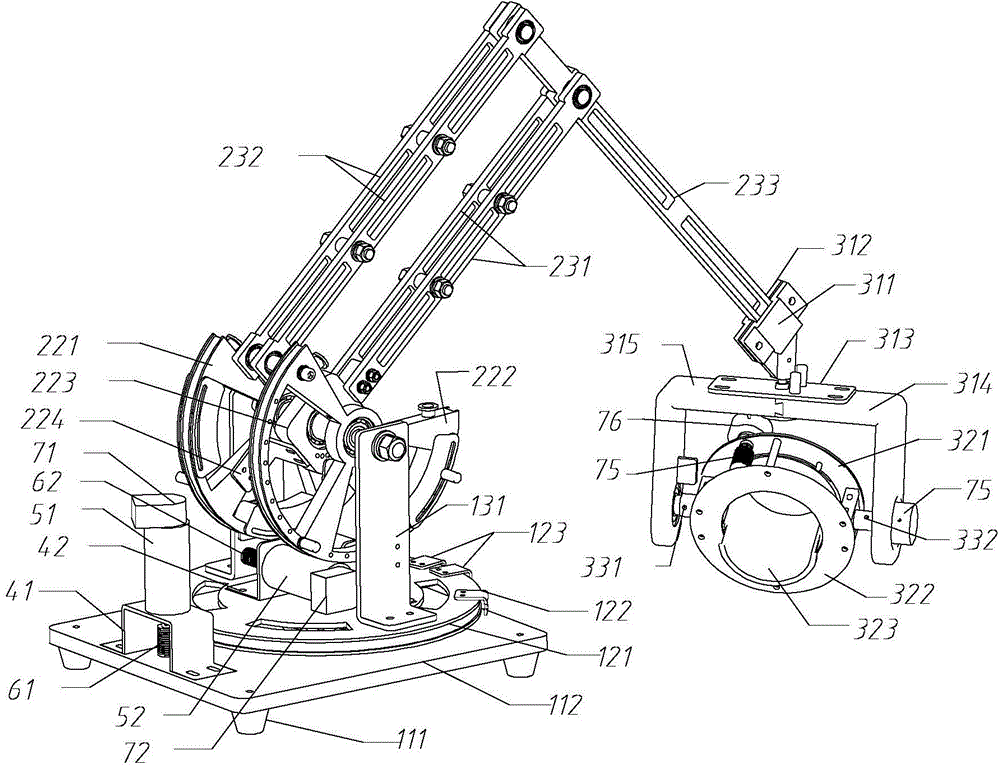
[0035] Such as figure 1 and figure 2 As shown, a 6-DOF force feedback manipulator with expandable connection includes a base mechanism 1, a parallelogram mechanism 2 arranged on the base mechanism, and an end effector mechanism 3 arranged at the end of the parallelogram mechanism 2 ,
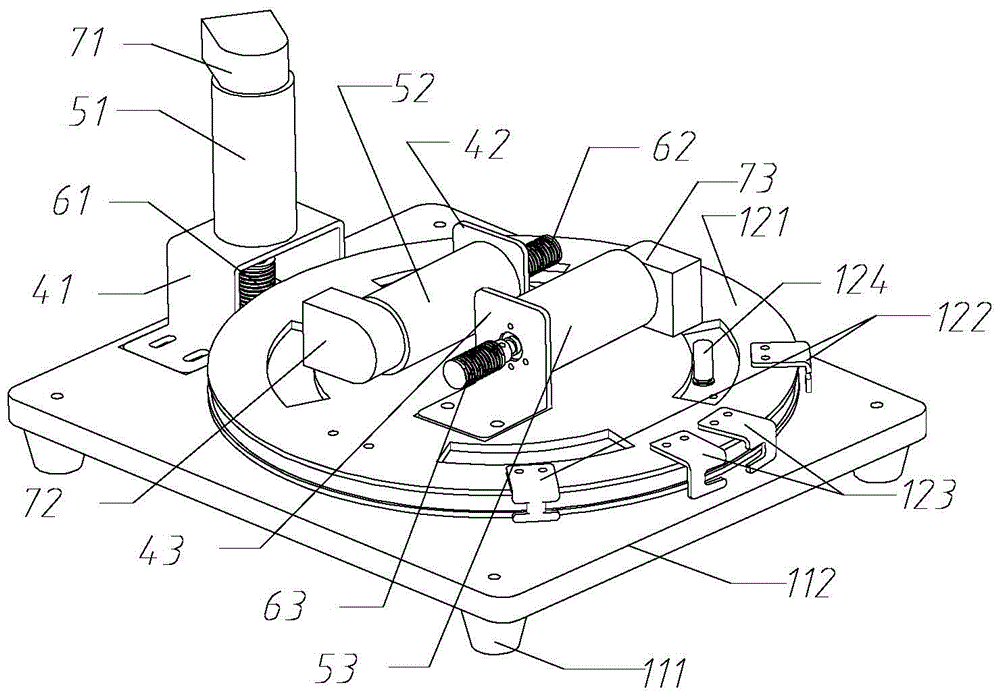
[0036] Simultaneously combine image 3 and Figure 4 As shown, the base mechanism 1 includes a base support platform 112 with supporting feet 111 at four corners, a deceleration driven wheel 121 horizontally rotatably arranged on the base support platform 112, and the middle part o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More