

Spraying robot driven by multiple parallelogram links in parallel
A parallelogram and spraying robot technology, which is applied in the direction of manipulators, spraying devices, program-controlled manipulators, etc., to achieve the effect of avoiding bulky, high dust-proof costs, and simple calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The following will describe the inventive concept of the present invention in detail in conjunction with the accompanying drawings, aiming to explain the technical problems to be solved by the present invention, the technical means adopted, and the role and function of each technical feature adopted in solving the above technical problems, And explain the technical effects that can be achieved by the technical problems solved by the above-mentioned technical means.
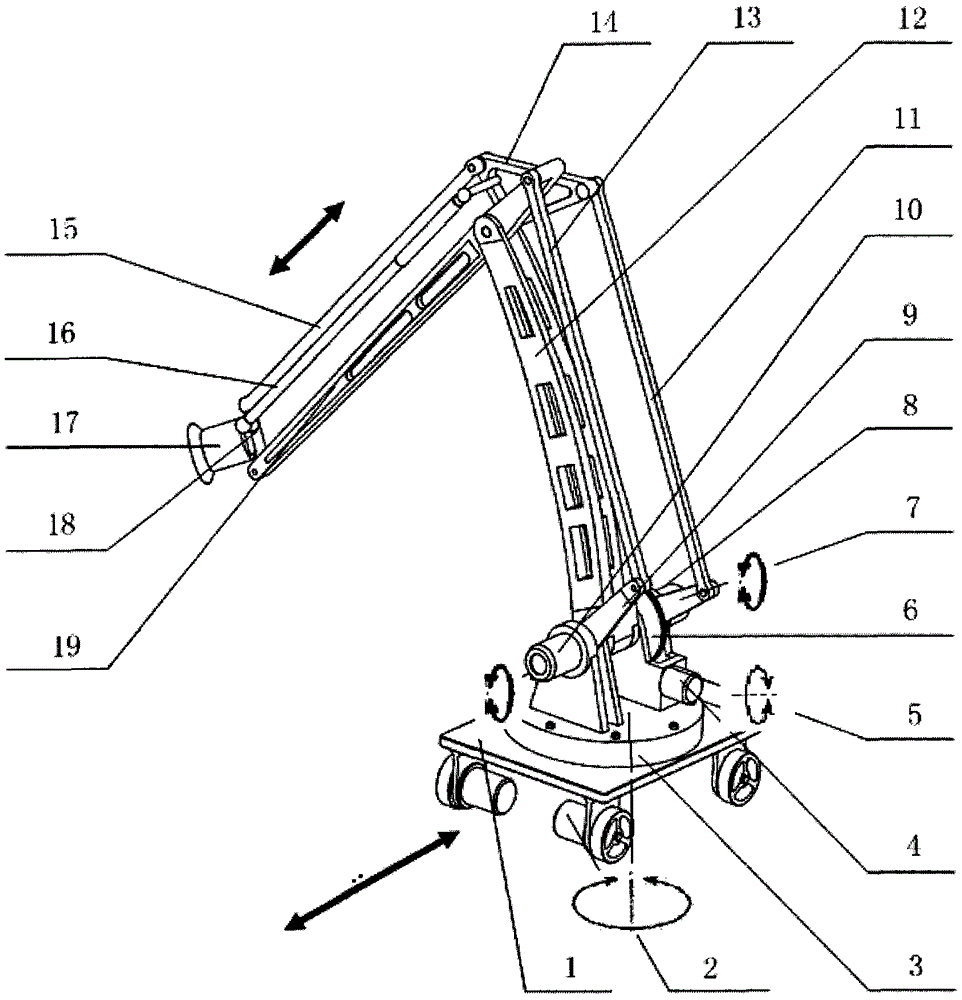
[0072] figure 1 It is a general assembly schematic diagram of a multi-parallelogram connecting rod parallel drive spraying robot of the present invention, which provides the overall and kinematic structure of the present invention. Such as figure 1 As shown in the direction of the arrow, the spraying robot of the present invention is a spraying robot with 5 degrees of freedom, including 3 translational degrees of freedom and 2 rotational degrees of freedom. Among them, the trolley body 1 has a translati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More