

Universal UAV (unmanned aerial vehicle) vision simulation platform
A technology of visual simulation and simulation platform, applied in general control systems, instruments, simulators, etc., can solve the problems of poor scalability and versatility, single object, etc., and achieve good scalability and versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with the accompanying drawings.
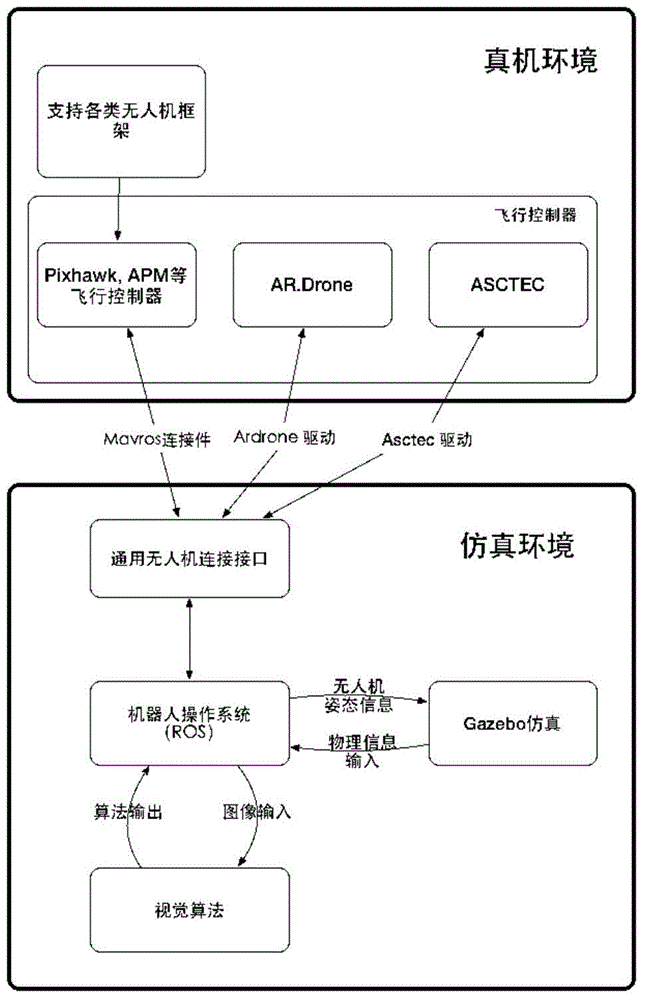
[0013] refer to figure 1 , a general-purpose UAV visual simulation platform, including a simulation environment part and a real environment part, the simulation environment part includes the robot operating system ROS, the open source robot simulation platform module Gazebo, the visual algorithm library and the ROS system transmission The incoming information is converted into a universal drone connection interface that can recognize control information from different flight controllers. The universal drone connection interface supports the ROS system. The open-source robot simulation platform module Gazebo, the visual algorithm library and the universal drone The machine connection interface is connected with the robot operating system ROS; the real environment part includes the aircraft frame and the flight controller, and the universal UAV connection interface is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More