

Single-driving autonomous remote control network boxing robot system and control method thereof
A robot system and single-drive technology, applied in remote control toys, sports accessories, automatic toys, etc., can solve problems such as inability to operate independently, lack of network management functions, and inflexible movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
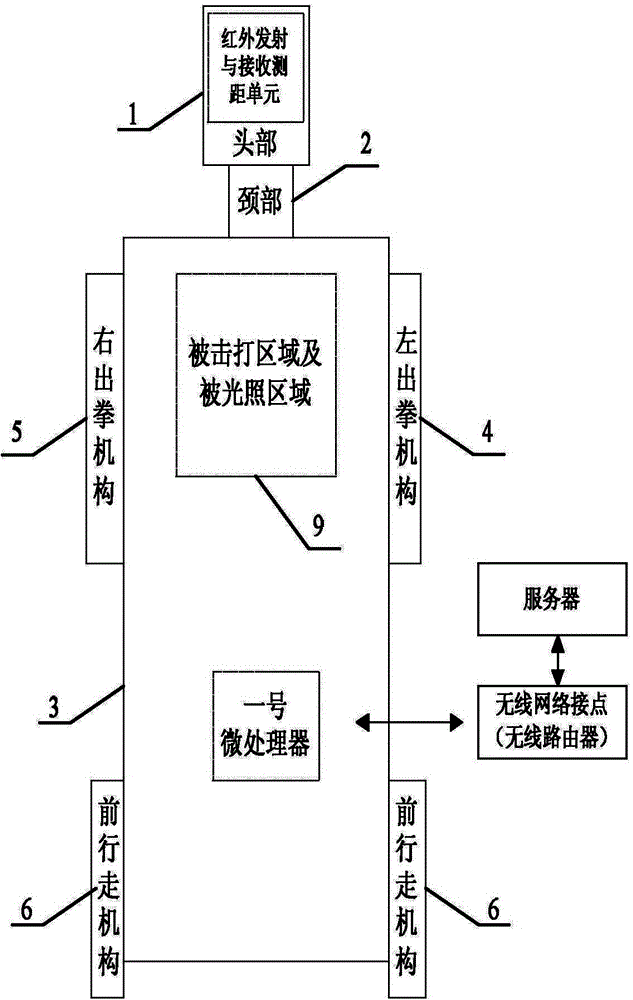
[0146] Specific implementation mode one: combine Figure 1 to Figure 5 , Figure 8 , Figure 11 to Figure 14 Describe this embodiment, the single-drive autonomous remote control network boxing model robot system described in this embodiment includes a robot, a wireless controller and a network server, and the robot can communicate with the wireless controller and the network server;
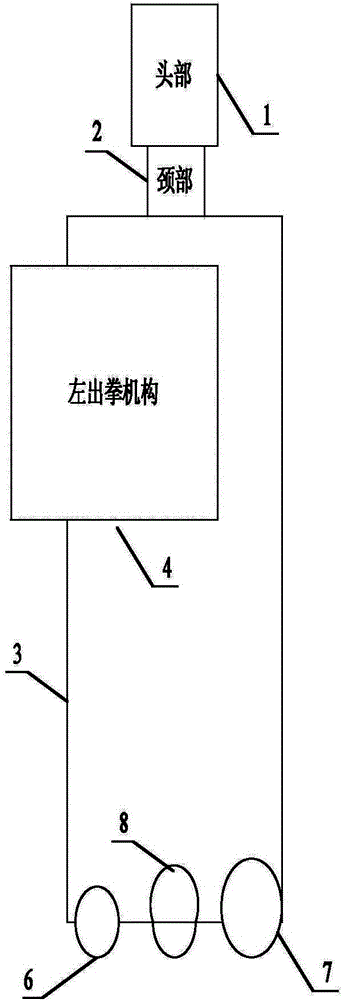
[0147] The robot comprises a head 1, a neck 2, a body 3, a left punching mechanism 4, a right punching mechanism 5, a front traveling mechanism 6, a rear traveling mechanism 7 and an intermediate raising cam 8;
[0148] The head 1 is provided with a hit area on the head, an infrared emitting and receiving ranging unit, an acousto-optic display device and an external target sensor, the external target sensor includes an image sensor and a decoder;
[0149] The inside of the body 3 is provided with a rotating cam, which is located between the left punching mechanism 4 and the right punching mecha...
specific Embodiment approach 2
[0223] Embodiment 2: This embodiment is a further limitation of the single-drive autonomous remote control network boxing model robot system described in Embodiment 1. In this embodiment, the motor is a brushless DC motor or a permanent magnet synchronous motor.
specific Embodiment approach 3
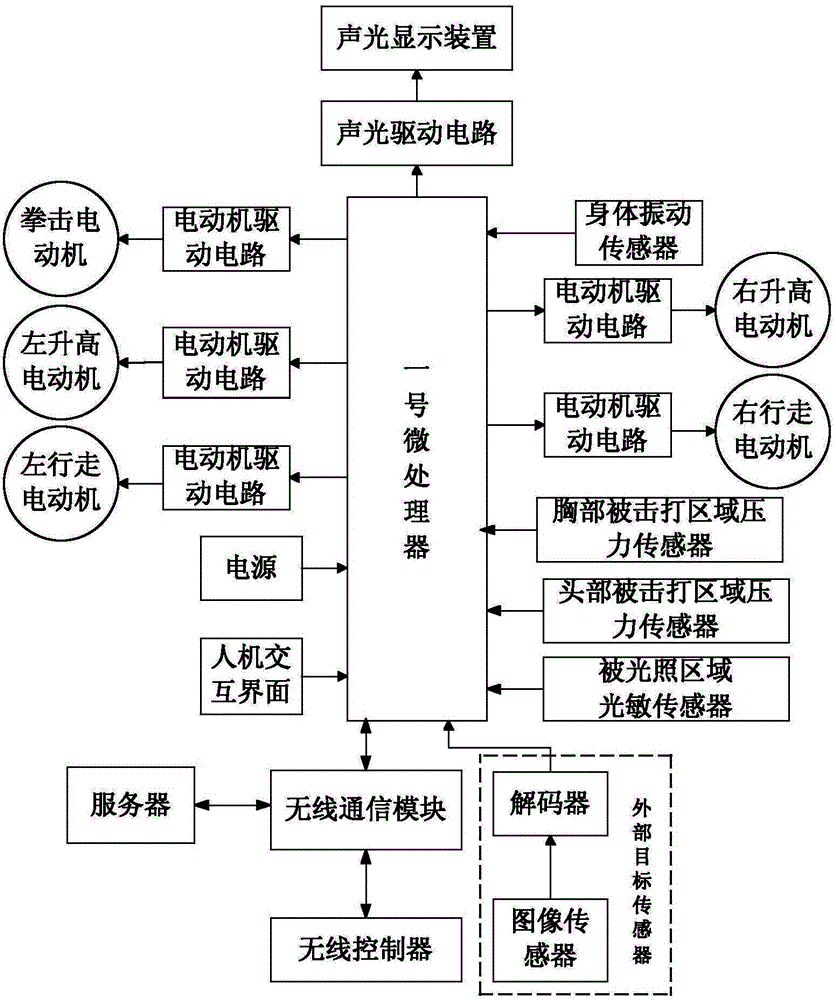
[0224] Specific implementation mode three: combination Image 6 with Figure 7 Describe this embodiment. This embodiment is a further limitation of the single-drive autonomous remote control network boxing model robot system described in Embodiment 2. In this embodiment, the motor drive circuit includes a microprocessor, a motion controller, three Phase bridge circuit pre-driver and three-phase bridge circuit, the control signal output end of the microprocessor and motion controller is connected to the control signal input end of the three-phase bridge circuit pre-driver, the three-phase bridge circuit pre-driver The drive signal output terminal is connected to the drive signal input terminal of the three-phase bridge circuit, the drive signal output terminal of the three-phase bridge circuit is used to connect the drive signal input terminal of the motor, and the feedback signal input terminal of the microprocessor and motion controller is used for Connect to the feedback si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More