

Hand-eye calibration method of robot linear structured light vision measurement system
A technology of visual measurement and robot line, which is applied to measurement devices, instruments, and optical devices, etc., can solve the problems that the movement accuracy of the end effector cannot reach pure translation movement, and the calibration is inaccurate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings and examples.
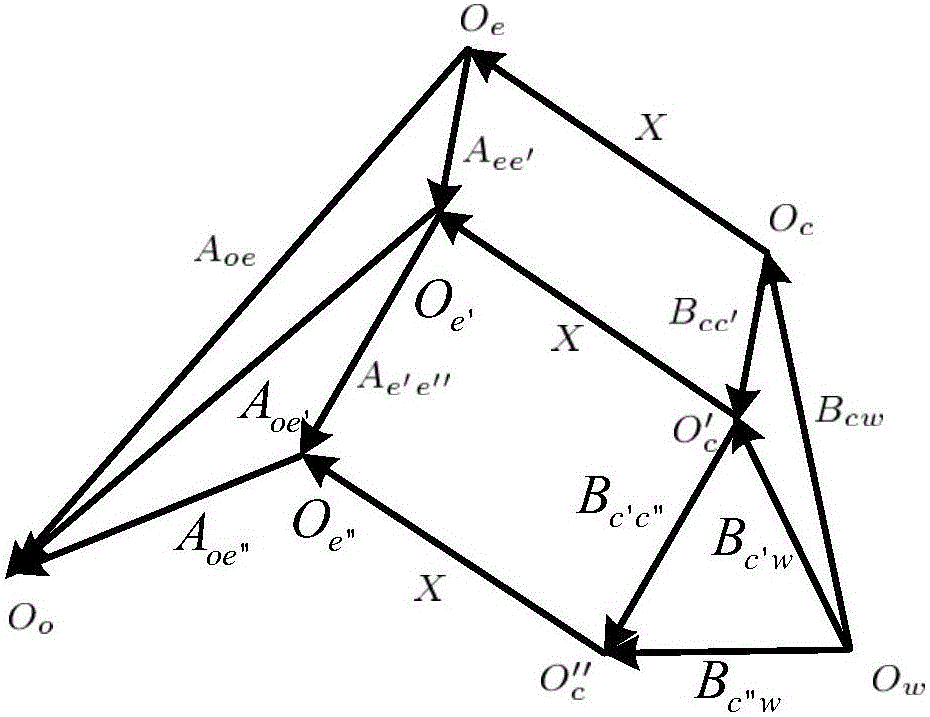
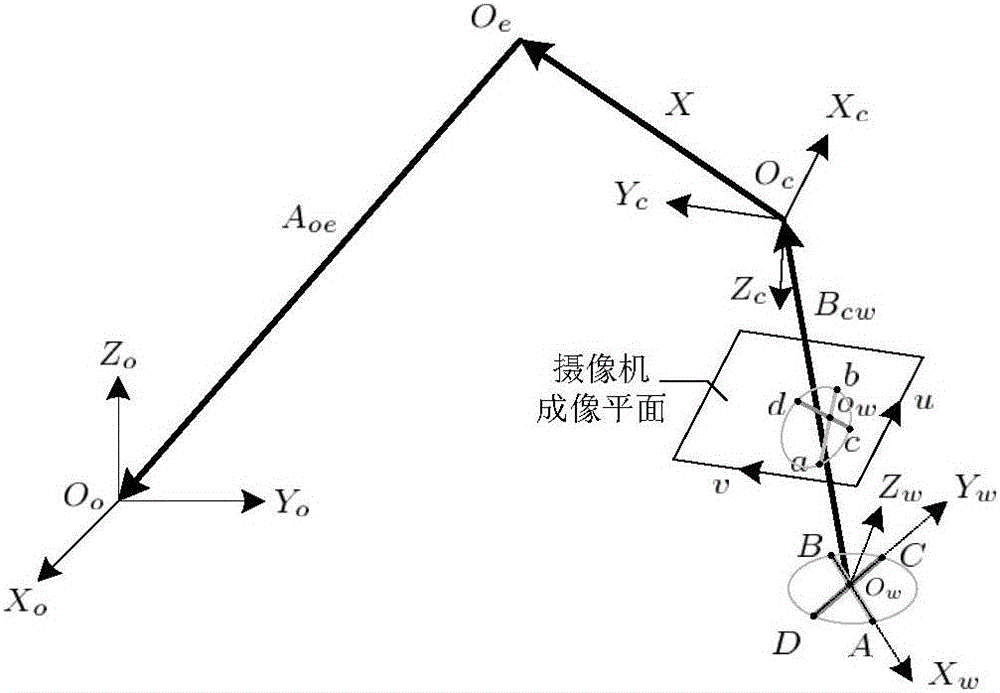
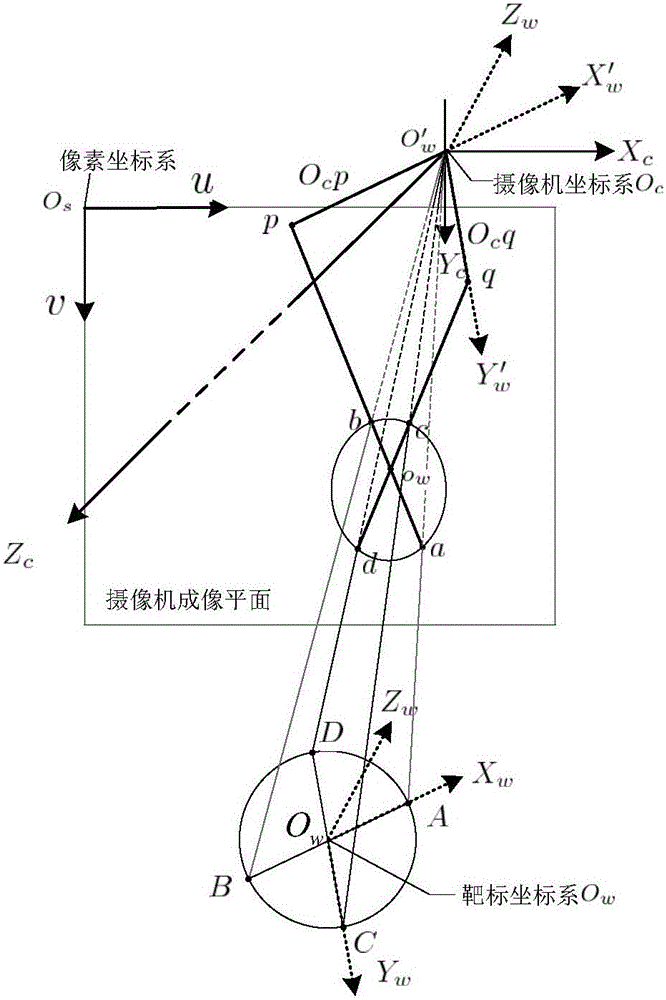
[0041] The invention provides a hand-eye calibration method for a robot line structured light vision measurement system; figure 1 As shown, the present invention takes a circle with a group of orthogonal diameters as the target, and sets a line-structured light projector at the collinear position of the cameras, so that the line-structured light rays are projected to the center of the circle, according to the distance between the camera coordinate system and the target coordinate system Finally, the first rotation matrix is obtained; after that, the end of the robot moves for the first time, so that the robot end coordinate system and the camera coordinate system change, while the target coordinate system and the robot base coordinate system remain unchanged. By analyzing the camera coordinate system again system and the target coordinate system, obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More