

Vector search iterative matching method based on inertia/gravity matching integrated navigation
A gravity matching and integrated navigation technology, which is applied in the field of inertial/gravity integrated navigation system, can solve the problems of gravity field filter divergence, reference trajectory deformation error sensitivity, batch correlation matching positioning algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
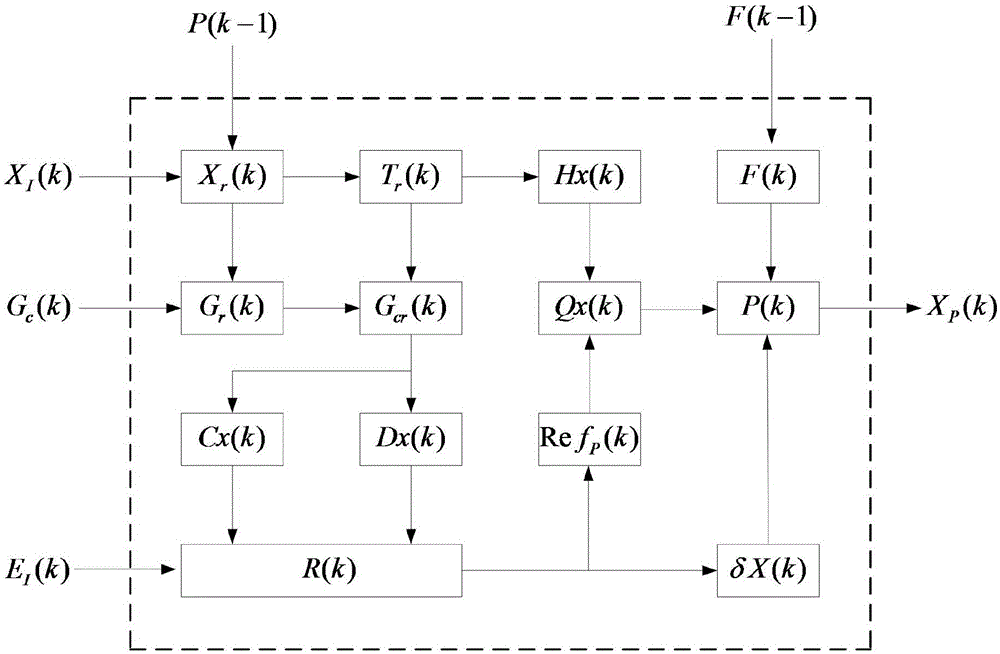
[0067] A vector search iterative matching method based on inertial / gravity matching combined navigation, the solution equation is as follows:
[0068] x r (k)=X I (k)+P(k-1)
[0069] G r ( k ) = G M ( X r ( k ) ) = { G r 1 ( k ) , G r 2 ( k ) , ... , G r N ( k ) }
[0070] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More