

Vector Search Iterative Matching Method Based on Inertial/Gravity Matching Combined Navigation
A technology of gravity matching and integrated navigation, applied in the field of inertial/gravity integrated navigation system, can solve the problems of large calculation amount of batch correlation matching positioning algorithm, sensitive to reference trajectory deformation error, and difficult to obtain error statistical model, so as to avoid errors and divergence. , The initial position error requirements are low, and the effect of suppressing divergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
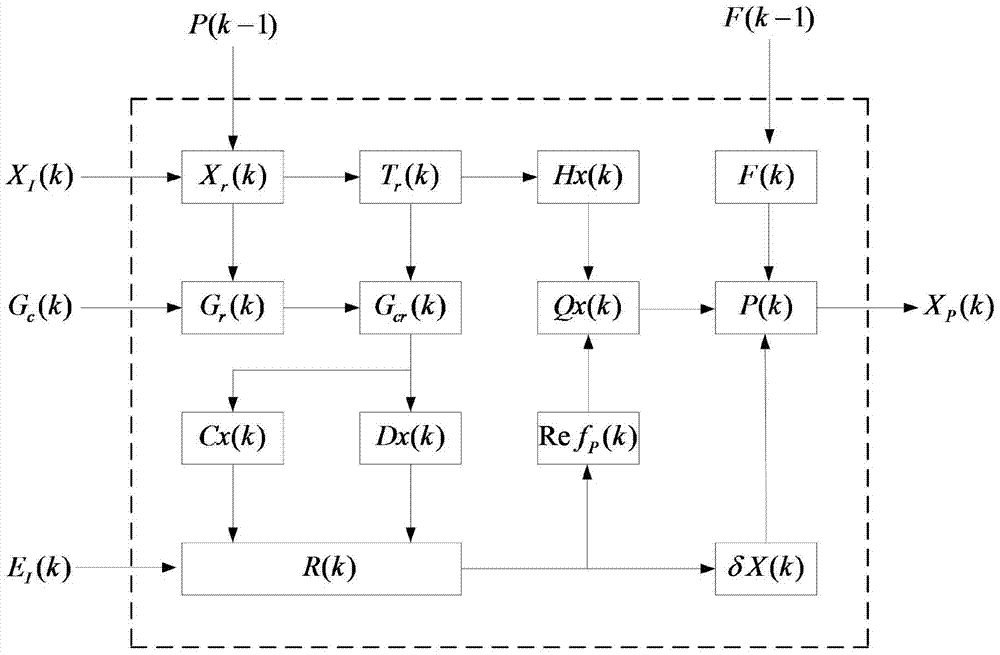
[0067] A vector search iterative matching method based on inertial / gravity matching combined navigation, the solution equation is as follows:
[0068] x r (k)=X I (k)+P(k-1)
[0069]
[0070]
[0071] G cr (k)=G c (k)-G r (k)
[0072]
[0073]
[0074]
[0075] R(k)=[max{-2Cx(k)-3Dx(k),-E I(k)-P(k-1)},
[0076] min{2Cx(k)+3Dx(k),E I (k)-P(k-1)]
[0077]
[0078]
[0079]
[0080] δX(k)={Ref p (k)=Ref(δX)≤Ref(dx)|dx∈R(k)}
[0081] Qx(k)=Ref p (k)·Hx(k)
[0082]
[0083]
[0084] x p (k)=X I (k)+P(k)
[0085] The vector search iterative matching algorithm solution process of the present invention is as follows figure 1 As shown, the input of the system is the inertial navigation position information, the real-time measurement value of gravity and the precision characteristics of the inertial navigation s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More