

Design of automatic take-off control strategy for a small unmanned helicopter
An unmanned helicopter, automatic take-off technology, applied in attitude control and other directions, can solve the problems of unstable airflow, helicopter rollover, instability, etc., to achieve the effect of inhibiting ground slip, rising steadily, and ensuring attitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further described now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, and only illustrate the design idea of the present invention in a schematic manner.
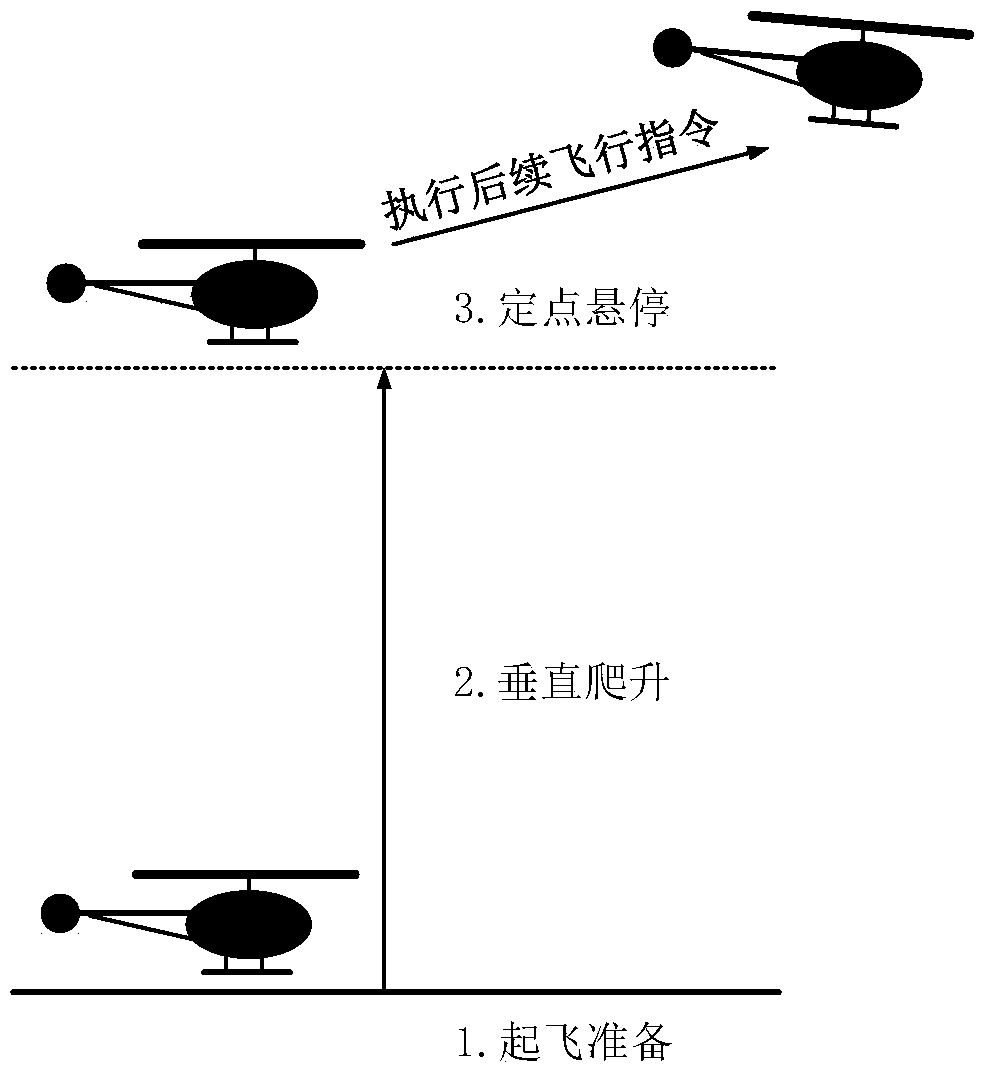
[0070] Such as figure 1 As shown, the automatic take-off process of the unmanned helicopter is divided into three stages: ground preparation, vertical climb, and fixed-point hovering:
[0071] Among them, the helicopter stays on the ground during the ground preparation phase. Due to the constraints on the ground, the force on the helicopter is balanced and the state remains stable. Changes, this stage starts from the time when the helicopter receives the automatic take-off command and ends when the helicopter leaves the ground completely. The main tasks of this stage are: (1) The flight control system makes a judgment on whether to respond to the take-off command after receiving the automatic take-off control command; (2) ) If it is det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More