

Biaxial motion platform positioning and dynamic locus tracking control device and method
A motion platform and trajectory tracking technology, applied in program control, digital control, electrical program control, etc., can solve problems affecting the positioning accuracy of the dual-axis motion platform system, affecting the tracking accuracy of the dual-axis motion platform system, and platform vibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
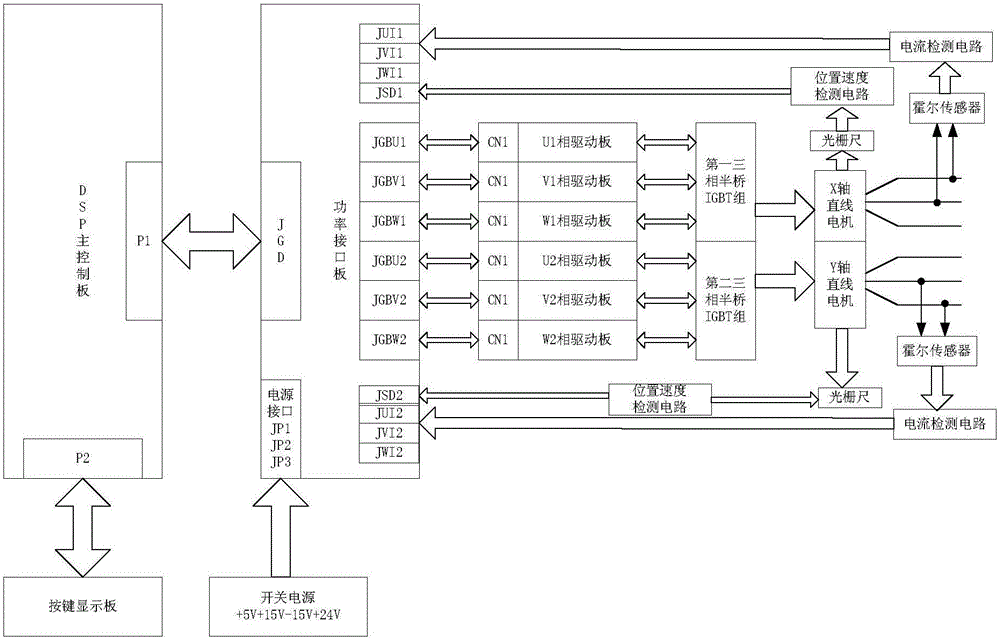
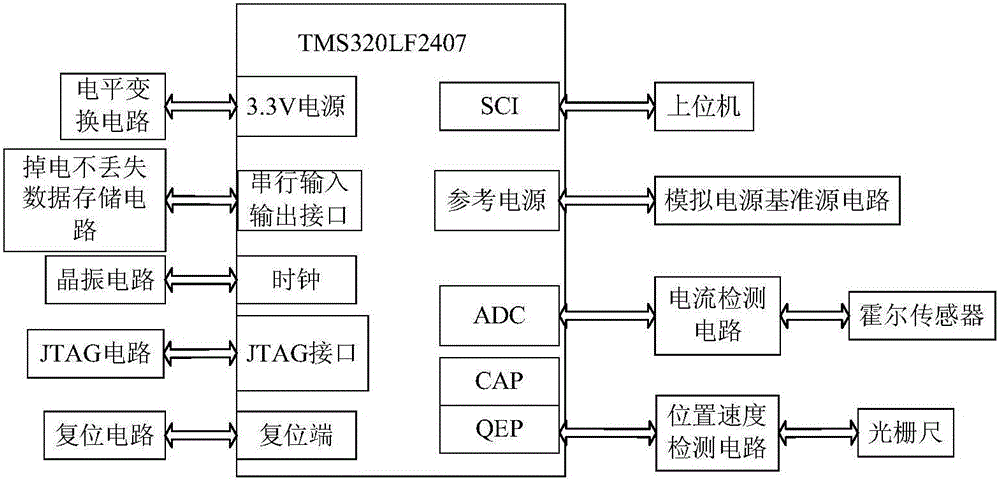
[0088] A positioning and dynamic trajectory tracking control device for a two-axis motion platform, its structure is as follows figure 1 As shown, it specifically includes: a DSP processor; a position and speed detection circuit for converting the position and speed signals collected by the grating ruler into a digital quantity that can be recognized by the DSP; for collecting the motor current and converting the current analog quantity into a digital quantity that can be recognized by the DSP Digital current detection circuit; key display board for setting DSP parameters and displaying DSP processing results; power interface board, IGBT driver board, first three-phase half-bridge IGBT group and second three-phase half-bridge IGBT group.
[0089] Since the two permanent magnet synchronous linear motors and their drive circuits in the dual-axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More