

Self-adaptive finite time convergence sliding-mode control method of robot
A technology with limited time and control method, applied in the field of control, can solve problems such as difficulty in meeting the control accuracy and torque smoothness requirements of robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
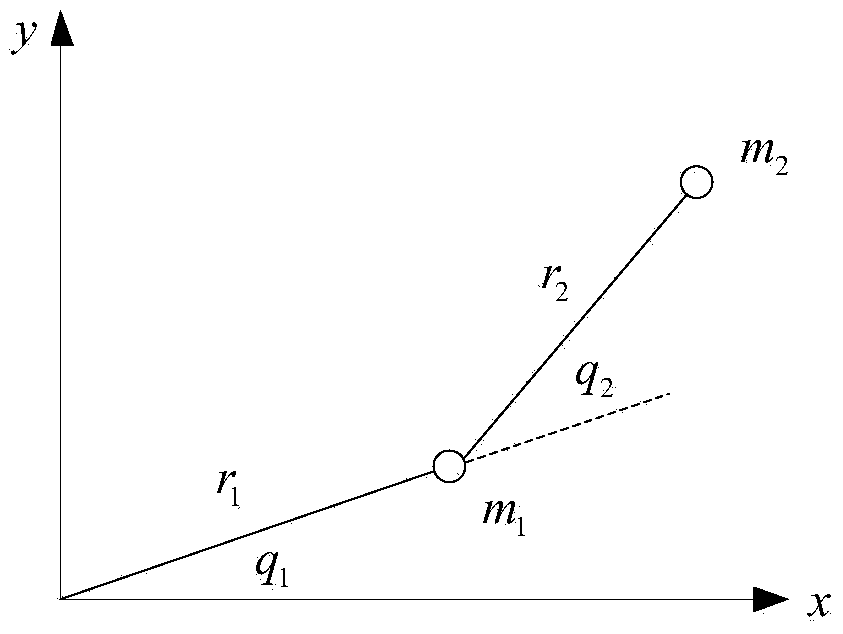
[0182] The method of this embodiment takes a conventional 2-branched manipulator (a typical serial robot system) as the control object, and the 2-branch structure is as follows: figure 2 shown, where r 1 ,r 2 , J 1 , J 2 ,m 1 ,m 2 ,q 1 ,q 2 Respectively represent the length of branch 1, the length of branch 2, the inertia of branch 1, the inertia of branch 2, the mass of branch 1, the mass of branch 2, the angle of branch 1 and the angle of branch 2.
[0183] given its main structural parameter r 1 ,r 2 , J 1 , J 2 ,m 1 and m 2 They are 1m, 0.8m, 5kgm, 5kgm, 0.5kg and 1.5kg respectively. Assume the desired trajectory q d,rob =[q d,rob,1 ,q d,rob,2 ] T and the initial pose q 0,rob respectively
[0184] q d,rob,1 =a 1 sin(ω 1 t)+a 2 cos(ω 2 t)+a 3 sin(ω 3 t)+a 4 cos(ω 4 t)+a 5 sin(ω 5 t)+a 6 cos(ω 6 t) (3.1)
[0185] q d,rob,2 =b 1 sin(ω 1 t)+b 2 cos(ω 2 t)+b 3 sin(ω 3 t)+b 4 cos(ω 4 t)+b 5 sin(ω 5 t)+b 6 cos(ω 6 t)(3.2)
[0186] q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More