

Series-parallel two-foot iron-tower climbing robot
A robot and hybrid technology, applied in the field of robotics, can solve the problems of inability to climb multiple sides of the tower, high requirements for the structure of the tower, and poor adaptability, so as to ensure safe and reliable operation, improve maintenance efficiency, and save labor costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0032] One, at first introduce the specific structure of the present invention.
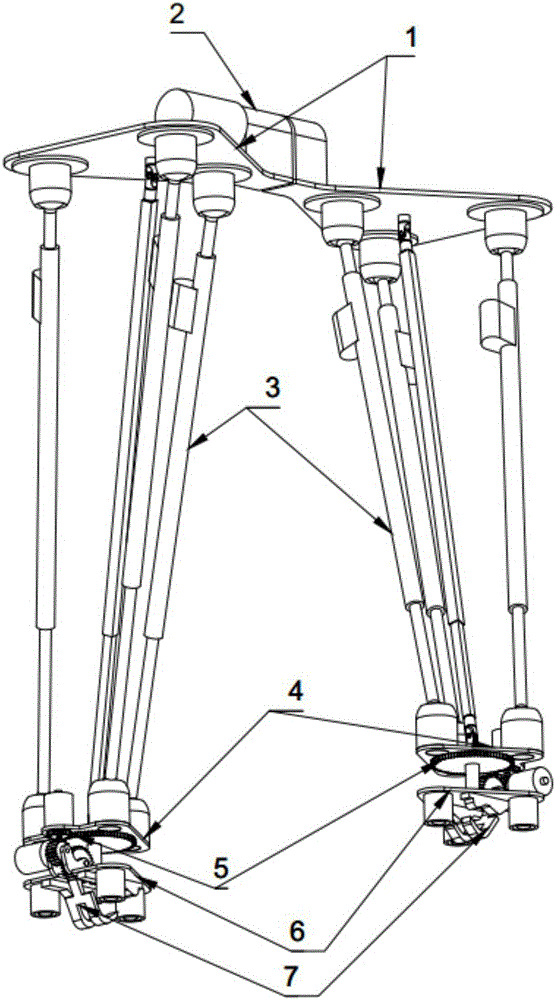
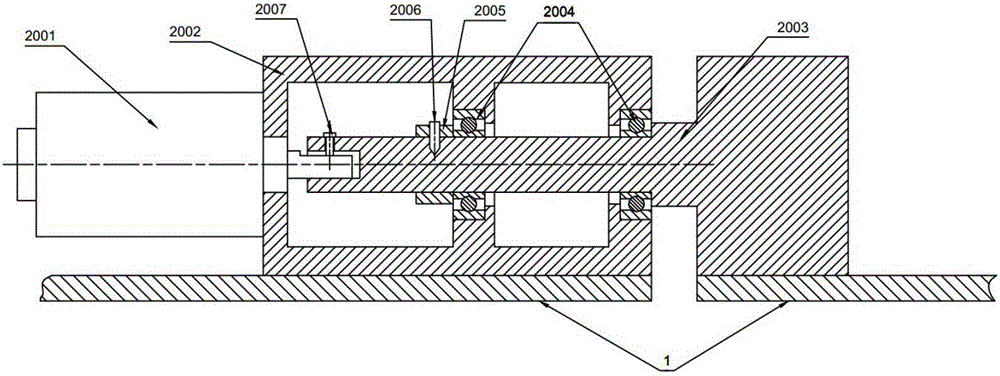
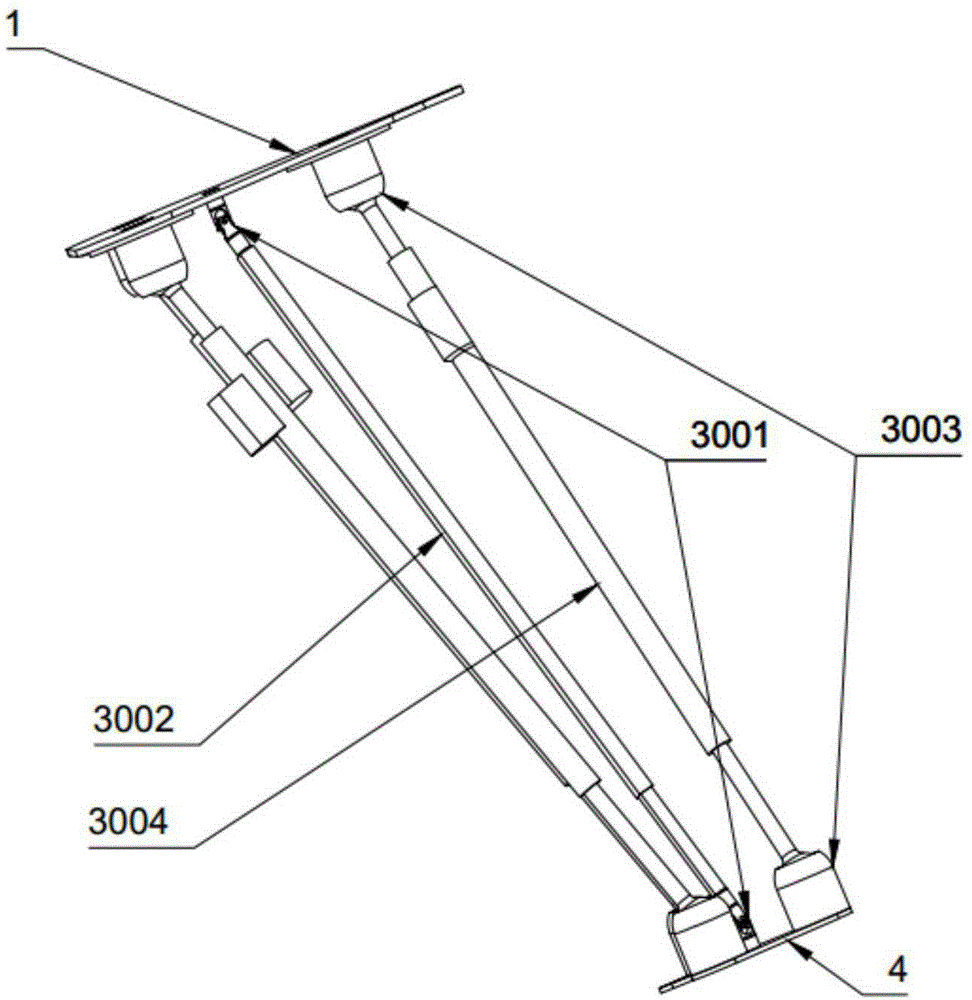
[0033] Overall structure of the present invention is as attached figure 1As shown, its structure is left-right symmetrical, including a pair of crotch platforms 1, a pair of parallel actuator arms 3, a crotch rotation pair 2, a pair of wrist platforms 4, a pair of foot rotation pairs 5, a pair of electromagnetic feet Ministry platform 6, a pair of foot mechanical claws 7. Wherein the crotch rotating pair is made up of span rotating pair motor 2001, span rotating pair bearing seat 2002, crotch rotating shaft 2003, deep groove ball bearing 2004, shaft sleeve 2005, pin 2006, fastening bolt 2007; parallel execution mechanical arm It is composed of a cross coupling 3001, a square steel sleeve telescopic mechanism 3002, a ball hinge 3003, and a linear push rod 3004; the foot rotation pair is composed of a slewing bearing installation threaded hole 5001, a slewing bearing installation washer 5002, a sl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More