

Endpoint force feedback system and method applied to grinding industry robot operation
An industrial robot and force feedback technology, applied in the field of force feedback system, can solve problems such as damage to the grinding head and quality problems, and achieve the effects of easy control, simple structure and lower production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
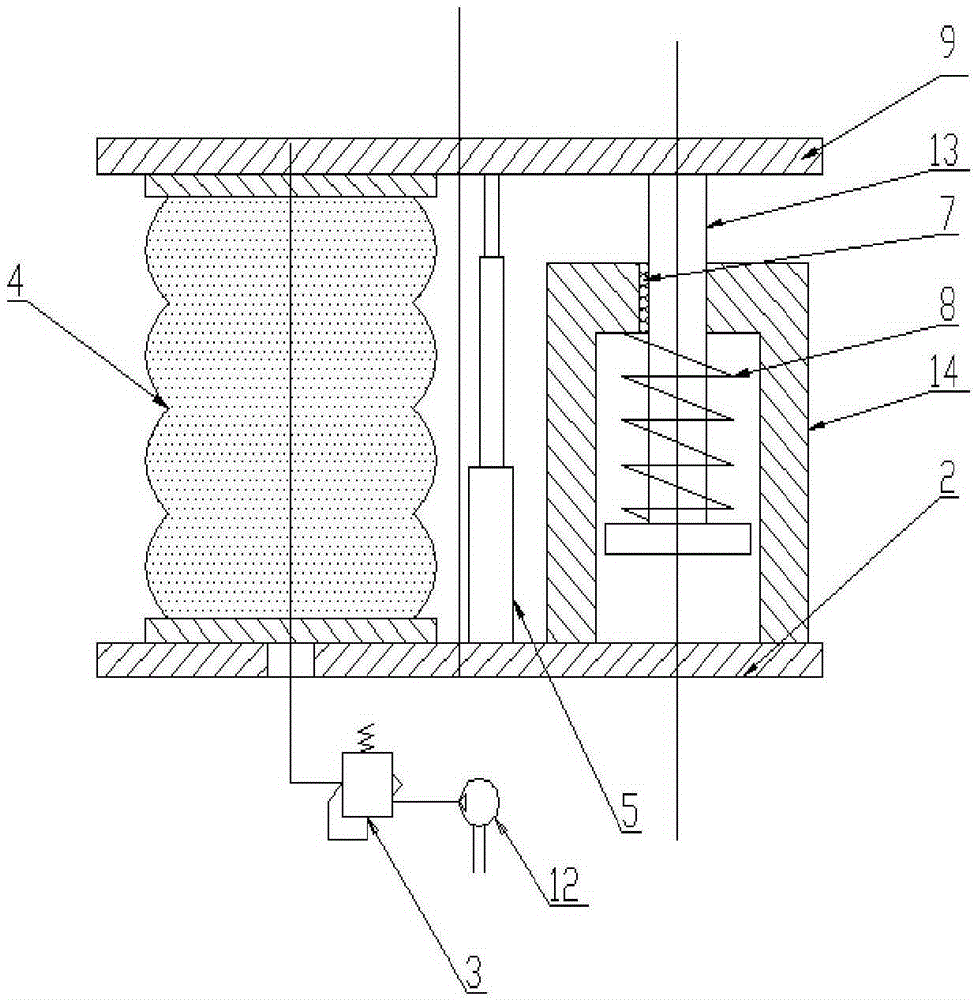
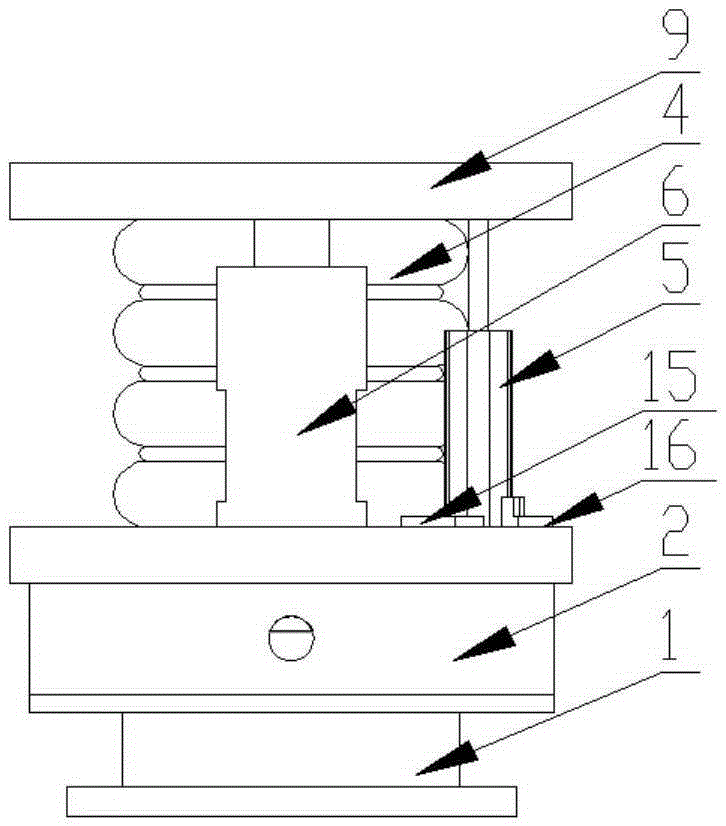
[0035] see figure 1 Referring to Fig. 3, the present invention provides a terminal force feedback system applied to grinding industrial robots, which is connected to the mechanical arm through a flange 1, including a lower base 2, an upper base 9, an air spring 4, a guide device 6, a displacement Sensor 5, compression spring 8, linear motion ball bearing 7, proportional valve 3, dust cover 11 and air compressor 12.
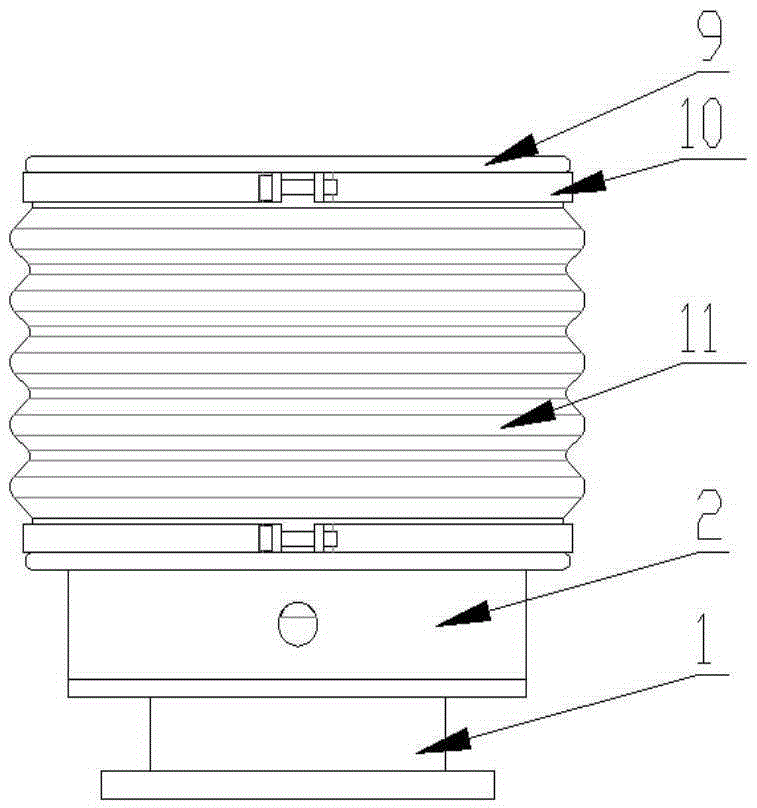
[0036] see Figure 2a and Figure 2b , the lower base 2 is connected to the flange 1, and is used to connect the terminal force feedback system applied to the grinding industrial robot operation with the mechanical arm of the robot; the upper base 9 is arranged opposite to the lower base 2, And form an accommodating space with the lower base 2 . Two ends of the dustproof cover 11 are respectively fixed on the upper base 9 and the lower...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More