

Portable remotely controlled riding following robot
A robot-following, portable technology that is applied to motor vehicles, power plants, and tracked vehicles. It can solve the problems of large size, heavy weight, and inconvenient use, and achieve the effects of convenient control and use, large application prospects, and wide range of uses.
Pending Publication Date: 2016-01-06
苑雪山
View PDF1 Cites 24 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] Professional robots cannot carry people, but balance vehicles, electric vehicles, electric scooters, etc. that can carry people generally weigh more than 20kg, and small balance vehicles exceed 10kg. Not only are they heavy and large in size, they are not easy to carry
And when encountering obstacles such as steps, people need to pick them up to pass. As a means of transportation, it is not convenient to use
[0004] The self-balancing car represented by segway uses photoelectric sensors to detect whether someone is standing on the car. The photoelectric sensors currently used are large in size and are not conducive to miniaturization. This is one of the many reasons why the self-balancing car is not portable.
In addition, for good passability, all self-balancing vehicles use large wheels of more than 6 inches and large hub motors, which also bring about the problem of being heavy and not portable.
[0005] Currently the lightest balance car on the market, such as the electric balance torsion car with patent number 201420314351.5, needs to connect two wheels through a hollow shaft, and detect the angle of the pedals on both sides to control the steering of the car body, which also brings mechanical structure Complicated, large size, not portable, etc.
[0006] In terms of control, all balance vehicles use a gyroscope system. The user can change the inclination angle of the pedals by leaning forward and backward slightly, and the gyroscope can detect the inclination angle of the pedals to realize forward, acceleration, and deceleration. , brakes and other driving operations, which requires that the pedals must be kept level at all times, while four-wheeled electric skateboards, or electric scooters with two front and rear wheels, although more stable, cannot maintain the level of the pedals when encountering uphill and downhill. Therefore, the gyroscope cannot be used to control the movement, and only the handle or a separate remote control can be used to control the movement of the car body, which also brings inconvenience to use
[0007] And almost all electric skateboards need a handheld remote control to control the speed and brakes, which is not convenient enough to use
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 2
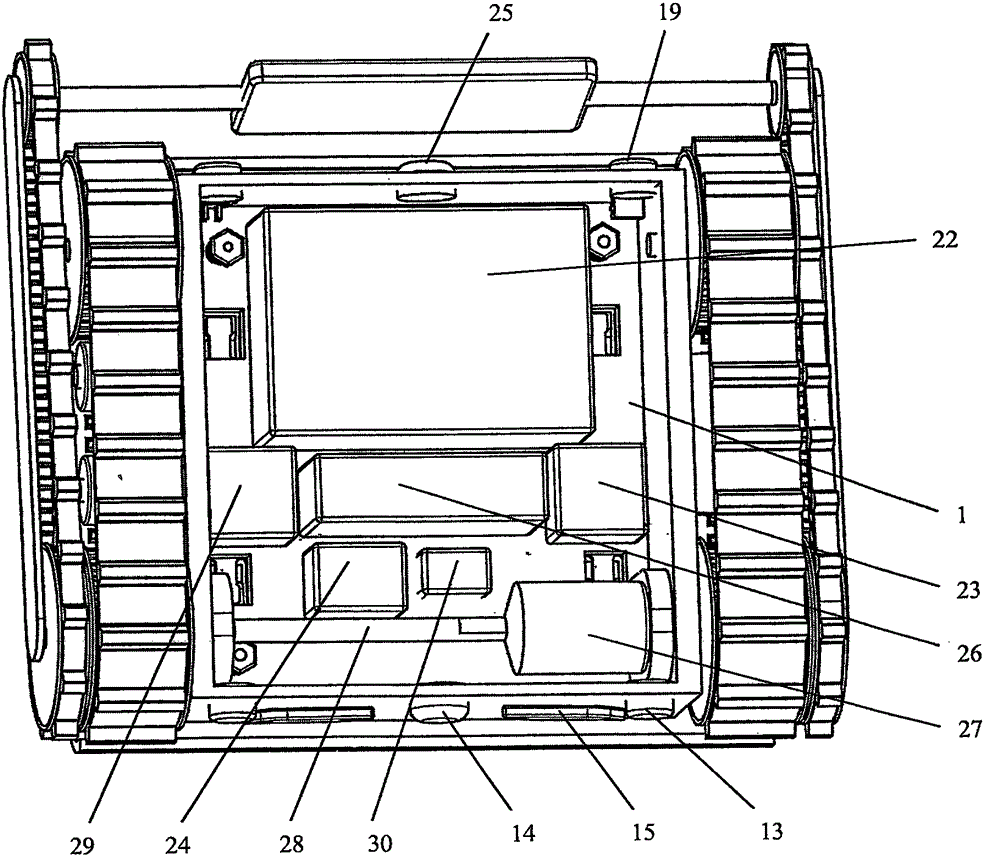
[0046] Such as Figure 4 As shown, a portable remote control walking follower robot of the present invention does not need to use crawlers, but simply uses wheels. The left and right sides are provided with driving wheels 2 with hub motors, and the left and right sides are provided with driven wheels 3. The wheel structure Although it is lacking in the ability to overcome obstacles and adapt to the ground, due to its simple structure, it can further reduce the weight, making it lighter and more suitable for use indoors or on flat roads.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
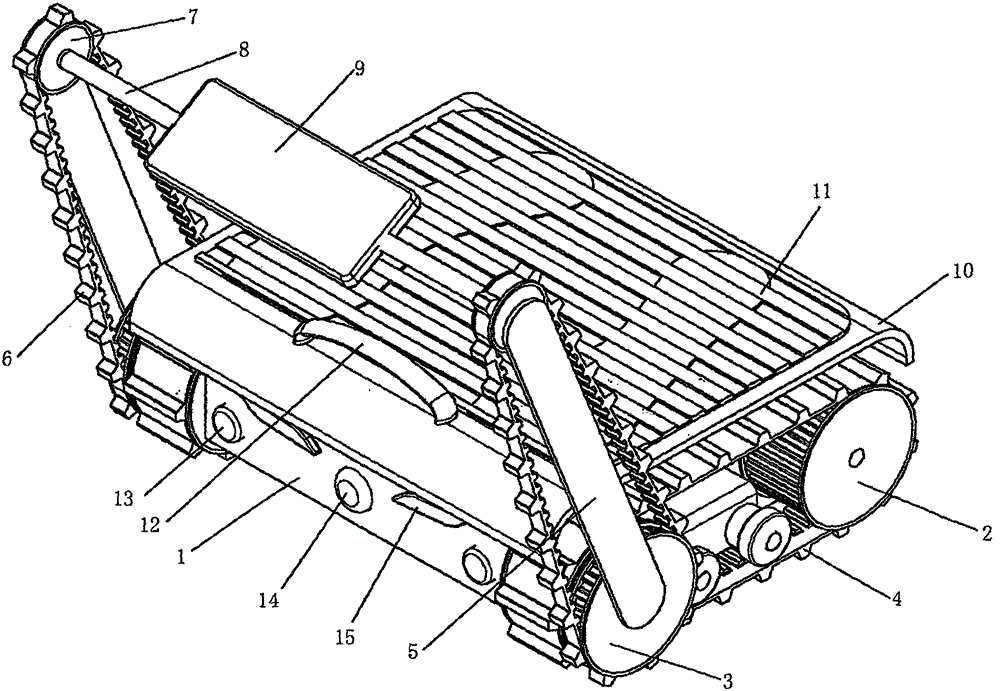
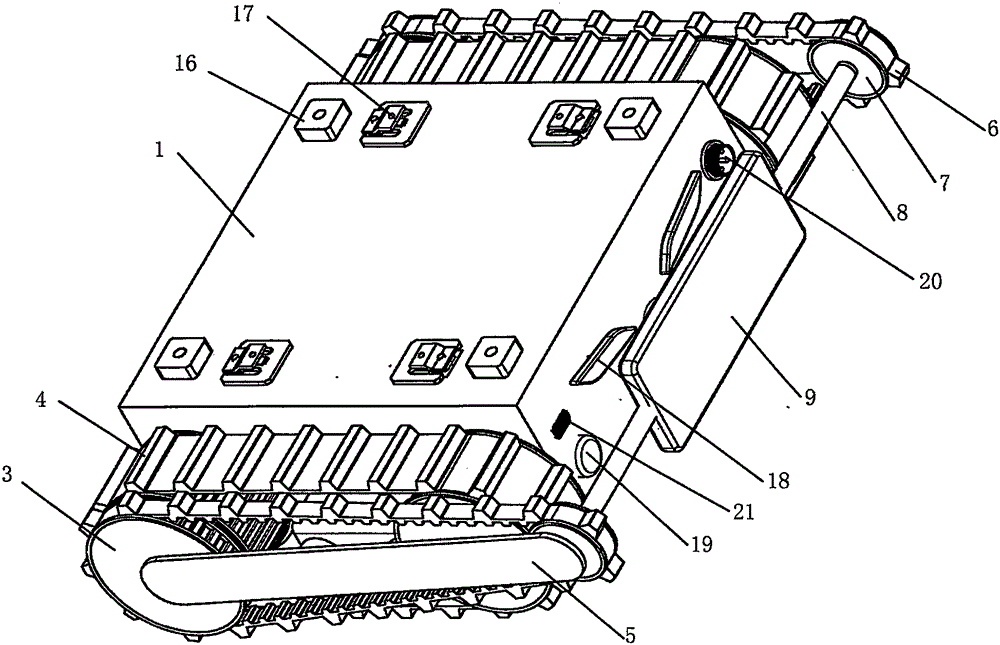
The invention provides a portable remotely controlled riding following robot small in volume, light in weight and convenient to carry. The portable remotely controlled riding following robot comprises a vehicle body, wherein a driven wheel and a driving wheel with a hub motor are respectively mounted on the two sides of the vehicle body, a front video camera, a front lamp and a front ultrasonic sensor are arranged on the front of the vehicle body, and a rear lamp, a rear video camera and a rear ultrasonic sensor are arranged on the rear of the vehicle body. Due to the adoption of the motion sensing control of a gravity center of a human body, the two hands are liberated, control is flexible, the distance between the robot and a mobile phone of a user can be detected through two bluetooth modules, and a following function is realized. The portable remotely controlled riding following robot not only can be ridden by people, but also is combined with the remote control and following functions of the robot. The wheel type embodiment is suitable for indoor and flat road surfaces, the crawler type embodiment can pass uneven road surfaces, and the embodiment with swing arms can also climb up and down ladders and cross obstacles.
Description
technical field [0001] The invention relates to a walking replacement robot, in particular to a portable remote control walking replacement robot. Background technique [0002] People-carrying self-balancing vehicles have gradually entered the family and become a convenient means of transportation. At present, there is no product that can be used as a vehicle and as a robot. [0003] Professional robots cannot carry people, but balance vehicles, electric vehicles, electric scooters, etc. that can carry people generally weigh more than 20kg, and small balance vehicles exceed 10kg. Not only are they heavy and large in size, they are not easy to carry. And when encountering obstacles such as steps, people need to pick it up to pass through. As a means of transportation, it is not convenient enough to use. [0004] The self-balancing vehicles represented by segway all use photoelectric sensors to detect whether someone is standing on the vehicle. The photoelectric sensors curre...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B62D55/065B62D55/12B60K7/00
Inventor苑雪山
Owner苑雪山