

Construction method for mixed map for navigation of mobile robots
A mobile robot and construction method technology, applied in the field of hybrid map construction, can solve the problems of difficult management and maintenance of technology, and difficulty in having reliability, adaptability and scalability at the same time, and achieve easy management and maintenance, achieve reliability, The effect of reliable navigation information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
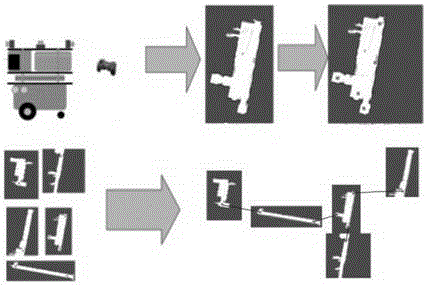
[0018] The embodiment utilizes the present invention to construct a hybrid map for an indoor environment, such as figure 1 shown, including the following steps:
[0019] 1. According to the shape characteristics of the entire area, it is divided into several local areas. Each local area must overlap with one or more local areas adjacent to it to ensure the connectivity of the topological structure; the environment of the overlapping area It should remain relatively static to ensure that the data collected by the mobile robot does not change significantly when it repeatedly visits the overlapping area;
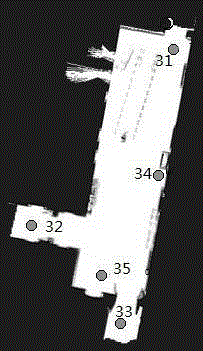
[0020] 2. Add visual marks on the ceiling in each overlapping area, and these visual marks correspond to specific nodes in the topological map;
[0021] 3. The mobile robot platform is equipped with a laser rangefinder and a camera, and the mobile robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More