

Guiding type virtual endoscope navigation method
A technology of virtual endoscope and navigation method, which is applied in the field of guided automatic virtual endoscope navigation, can solve problems such as complex topology, unstable centerline, and burrs, and achieve the goal of avoiding topology, clear field of view, and automatic browsing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
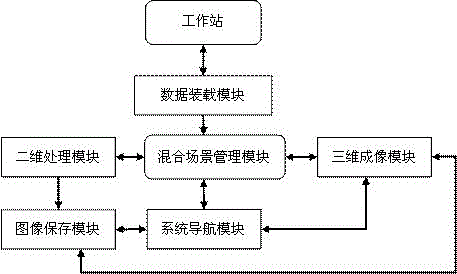
[0017] figure 1 The flow chart of the endoscope navigation system method is given. From figure 1 It can be seen that the workstation loads medical images into the hybrid scene management module through the loading module, and the hybrid scene management module sends the information to be adjusted to the two-dimensional processing module, and the information is fed back to the hybrid scene management module for display after routine processing. Similarly, the mixed scene management module sends data to the three-dimensional processing module, and the data is processed and returned to the mixed scene management module for display. The system navigation module communicates with the self-3D imaging module, so that the virtual camera can obtain the current image in real time, and send it to the hybrid scene management module for display. The imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More