A pipe inspection robot
A pipeline inspection and robot technology, applied in the field of robots, can solve the problems of inability to adapt to a large range of changes in pipe diameter, shortage, driving power of driving wheels slipping, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
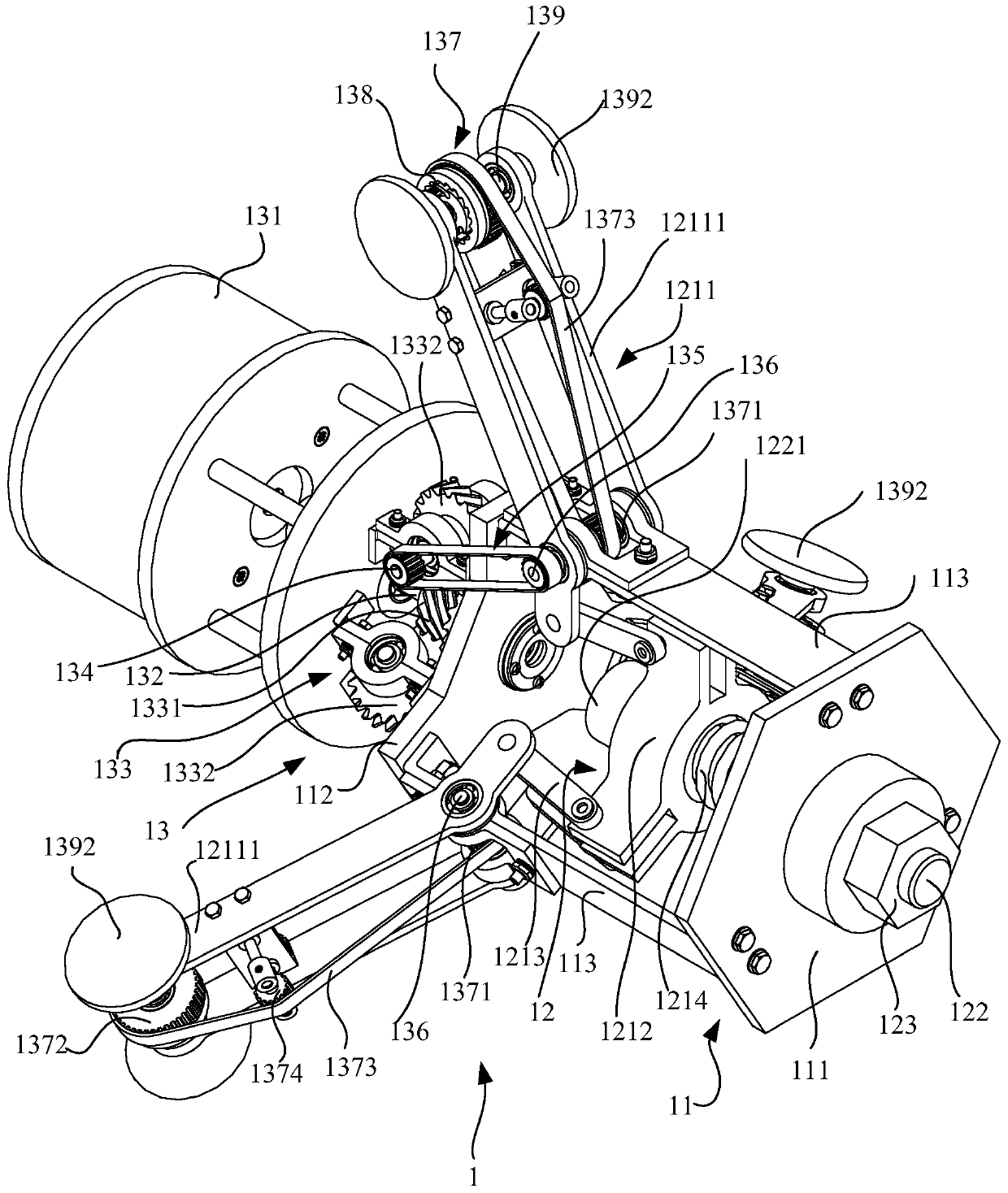
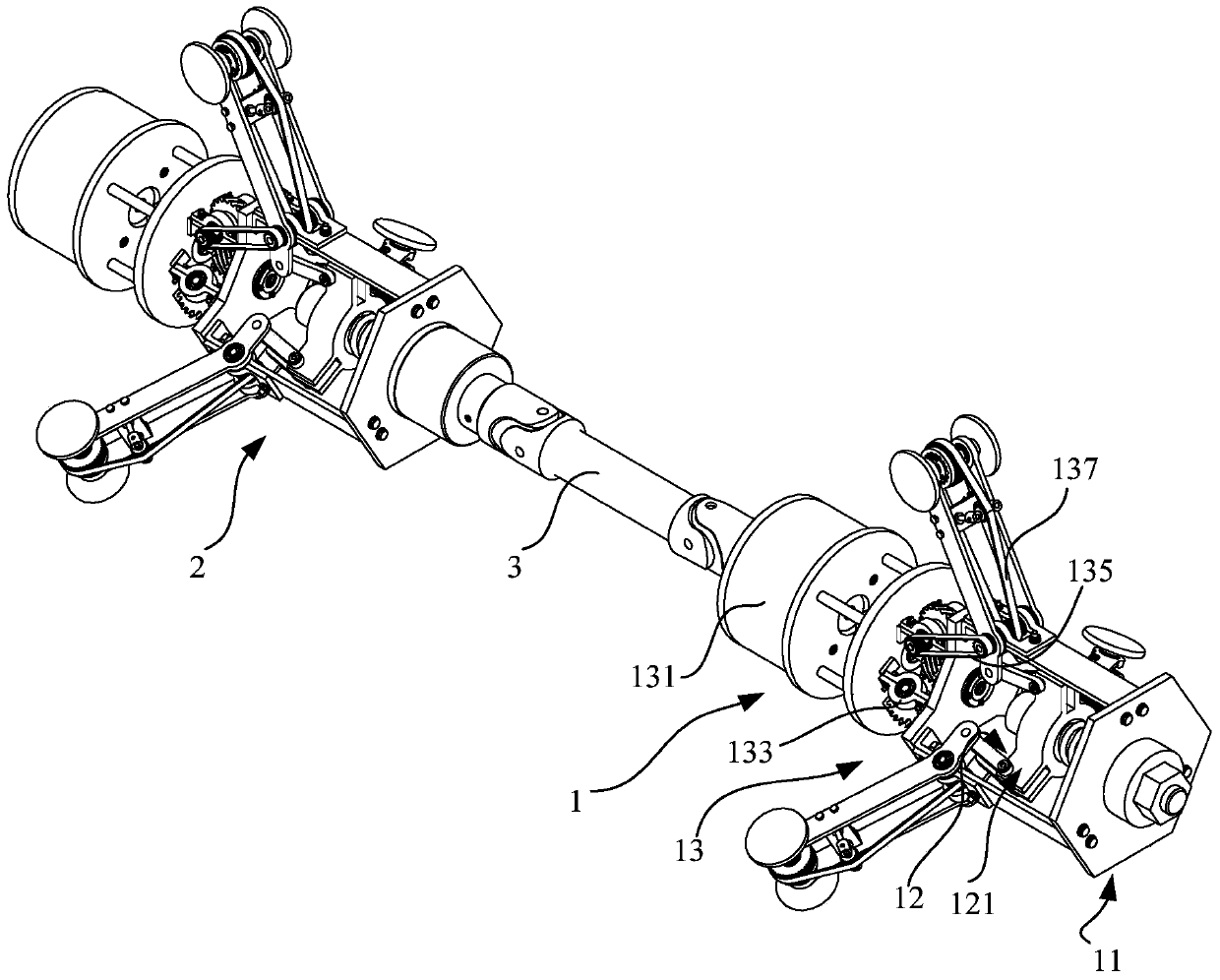
[0029] Such as figure 1 As shown, a pipeline inspection robot includes a first body 1, the first body 1 includes a frame 11, an adjustment mechanism 12 and a transmission system installed on the frame 11, and the transmission system 13 is used to transmit power to the adjustment mechanism 12 , the adjustment mechanism 12 includes at least three sets of four-bar mechanisms 121 that are rotationally symmetrical to the central axis of the frame 11, the four-bar mechanisms 121 are rocker 1211 slider 1212 mechanisms, including rocker 1211 and slider 1212 mounted on the frame 11 , the fixed point of the rocker 1211 on the frame 11 is located in the middle of both ends of the rocker 1211, the rocker 1211 and the slider 1212 are connected by the connecting rod 1213, and the end of the rocker 1211 away from the connecting rod 1213 is attached to the inner wall of the pipe, and the rocker 1211 The rod 1211 swings with the change of the inner diameter of the pipe. The four-bar mechanism ...
Embodiment 2
[0044] The pipeline detection machine in this embodiment is basically the same in structure as in Embodiment 1, including a first body 1, which includes a frame 11, an adjustment mechanism 12 and a transmission system 13 installed on the frame 11, and the transmission system 13 is used to transmit power to the adjustment mechanism 12. The adjustment mechanism 12 includes at least three groups of four-bar mechanisms 121 that are rotationally symmetrical to the central axis of the frame 11. The four-bar mechanisms 121 are rocker 1211 slide block 1212 mechanisms, including Rocker 1211 and slider 1212 on 11, the fixed point of rocker 1211 on the frame 11 is located in the middle of both ends of rocker 1211, rocker 1211 and slider 1212 are connected by connecting rod 1213, and rocking rod 1211 is far away from connecting rod 1213 One end of the pipe is attached to the inner wall of the pipe, and the rocker 1211 swings with the change of the inner diameter of the pipe.
[0045] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com