

Rapid convergence method based on improved complementary filter for attitude of self-balance mobile robot
A mobile robot and complementary filter technology, applied in directions such as navigation through velocity/acceleration measurement, can solve problems such as difficult initial real angle values, poor dynamic performance, and slow convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] A self-balancing mobile robot posture rapid convergence method based on improved complementary filtering of the present invention will be described in detail below with reference to the accompanying drawings.
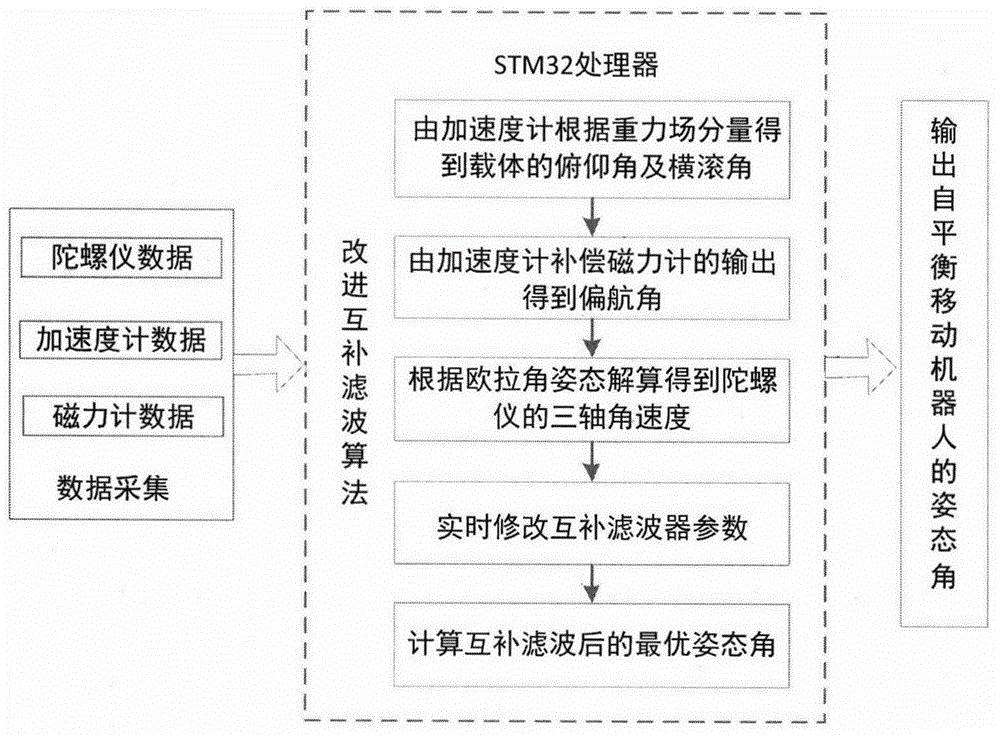
[0048] Such as figure 1 As shown, the algorithm flow of the improved complementary filtering is described in detail, and the final calculated complementary filtering angle has high precision, and the real-time response is better at the initial moment.
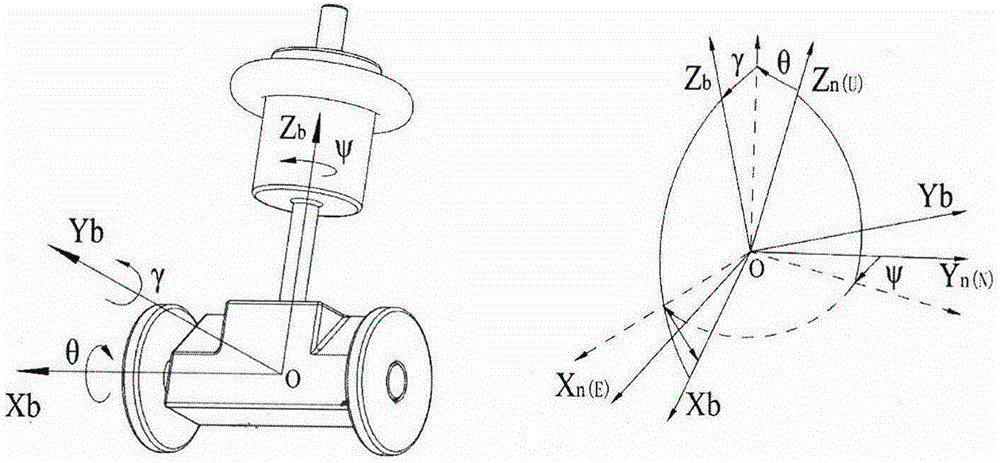
[0049] exist figure 2 , briefly describes the schematic diagram of the self-balancing robot coordinate system, where θ is the pitch angle, λ is the roll angle, and ψ is the yaw angle.
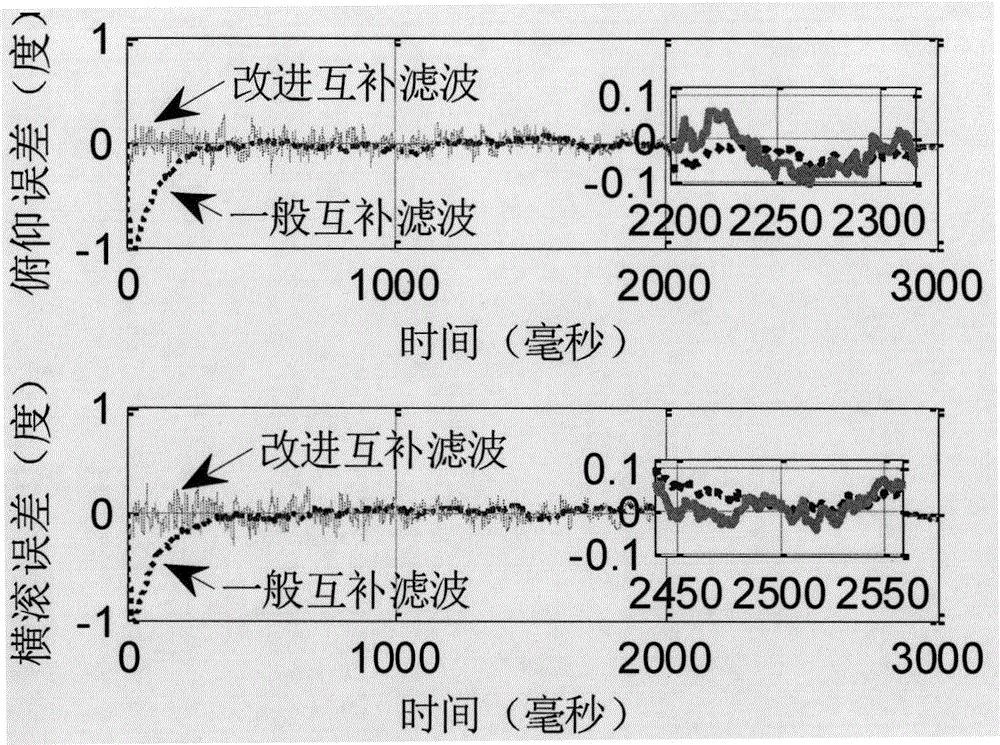
[0050] In Matlab simulation, take σ acc =0.2, σ gro =0.04, Δθ is a white noise with a Gaussian distribution with a variance of 1 and a mean of 0. Depend on image 3 and Figure 4 Simulation shows that the improved complementary filter has faster convergence at the initial moment.
[0051] The test uses the microcontroller S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More