

Soft-body crawling robot with four feet
A technology of crawling robot and robot body, applied in the field of robotics, can solve the problems such as the inability to complete the complex environment and the inability of the robot to enter the narrow space, and achieve the effect of simple structure and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The structure of the present invention will be explained in detail below in conjunction with the drawings and embodiments.
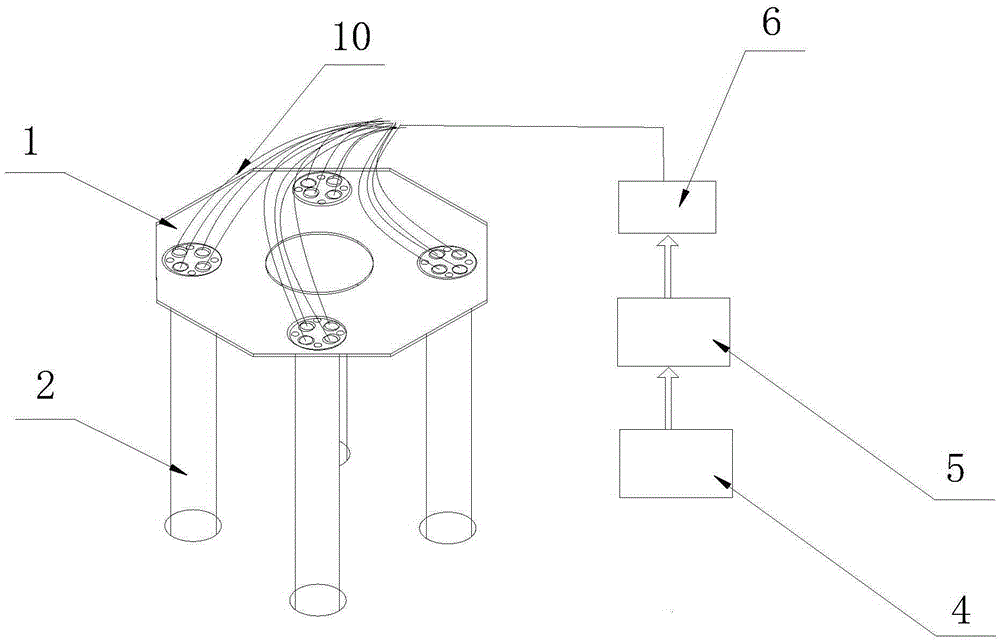
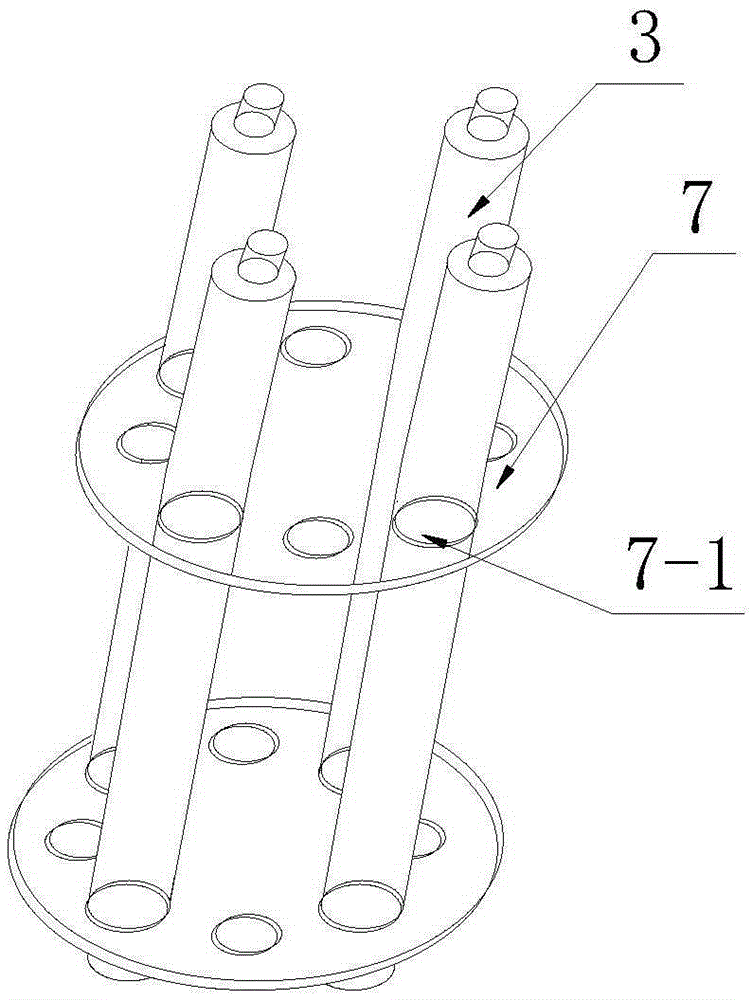
[0020] Such as Figure 1-3 Shown, a kind of soft body quadruped crawling robot, this robot comprises robot body and control system, and robot body comprises body support 1, four legs 2 that are installed on body support 1, and each leg 2 is extended by four extensions arranged side by side. The control system consists of a DSP control module 4 and a drive amplifier module 5. The input terminals of the drive amplifier module 5 are respectively connected to the DSP control module 4, and the output terminals are connected to the elongated pneumatic muscle 3 through sixteen pneumatic valves 6. connection, the air supply is connected to the pneumatic valve.
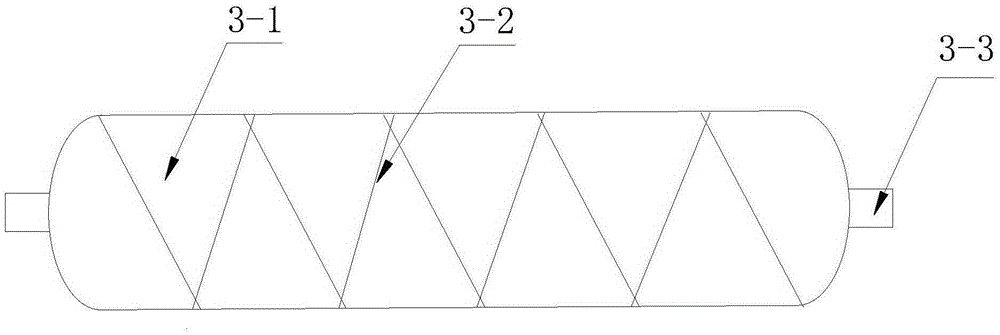
[0021] Among the four legs of the soft quadruped crawling robot of the present invention, each leg 2 is composed of four elongated pneumatic muscles 3 , a total of sixteen elongated pneumatic mus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More