

A Timed Delay Remote Operation Control Method Based on Wave Variable
A technology of teleoperation control and wave variable, which is applied in the field of timing delay teleoperation control based on wave variable, can solve problems such as time delay stability, and achieve the goal of improving the fidelity of force feedback, ensuring stability, and good position tracking performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
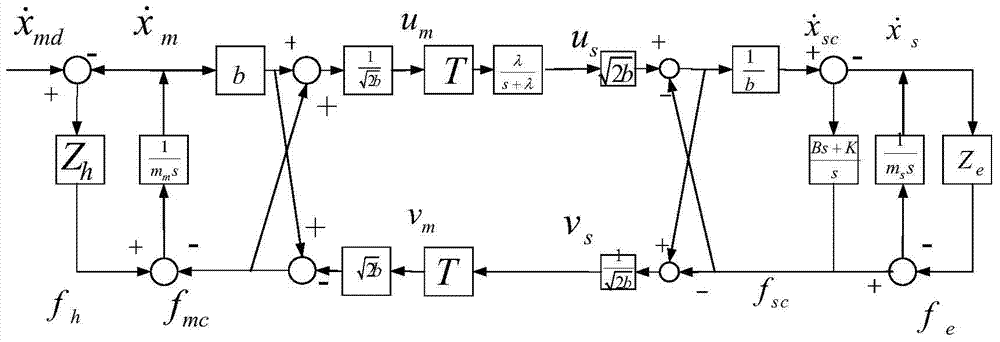
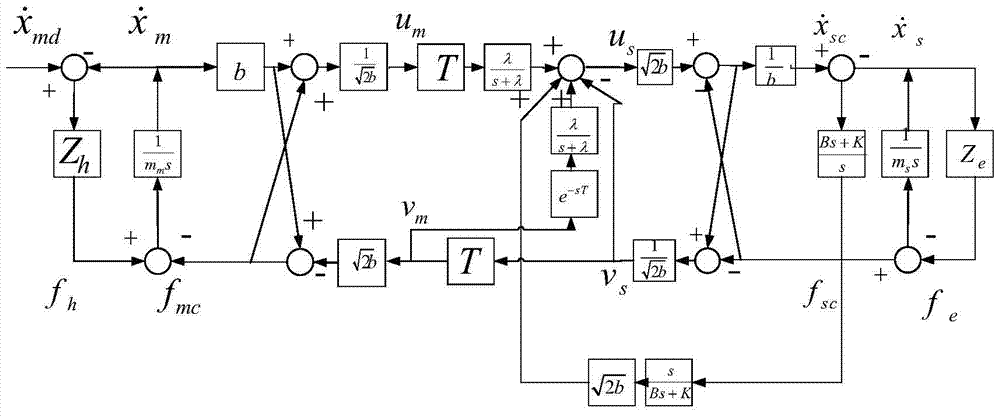
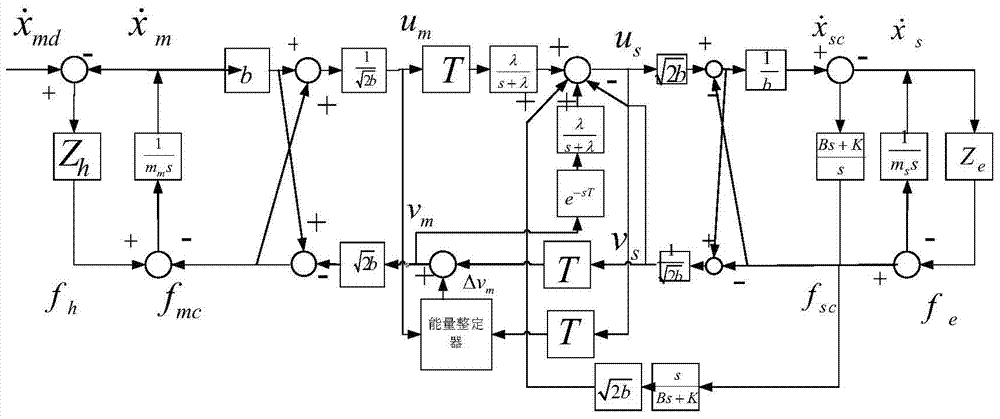
[0056] see image 3 , the present invention is based on the wave variable timing delay remote operation control method, comprising the following steps:
[0057] 1) Establish the dynamic model of the master end and the slave end:
[0058]
[0059]
[0060]
[0061] where M m = 1kg, M s =1kg, B=80Ns / m, K=80N / m, f mc Indicates the control force fed back from the slave to the master, f sc Indicates the control force produced by the slave controller, f h Indicates the force exerted by the hand on the main end, f e Indicates the force exerted by the environment on the slave. Indicates the expected speed of transmission from the master to the slave, and Respectively represent the actual speed of the master and slave, B and K respectively represent the differential parameters and proportional parameters of the slave controller. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More