

Navigation and positioning performance testing device and method for autonomous mobile robot
A technology of positioning performance and autonomous movement, applied in measurement devices, instruments, signal transmission systems, etc., can solve the problems such as the performance testing device and system evaluation method of the navigation and positioning system of autonomous mobile robots that have not been retrieved, and achieve good human-machine operation. Interface, high test accuracy, and visualization of the operation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
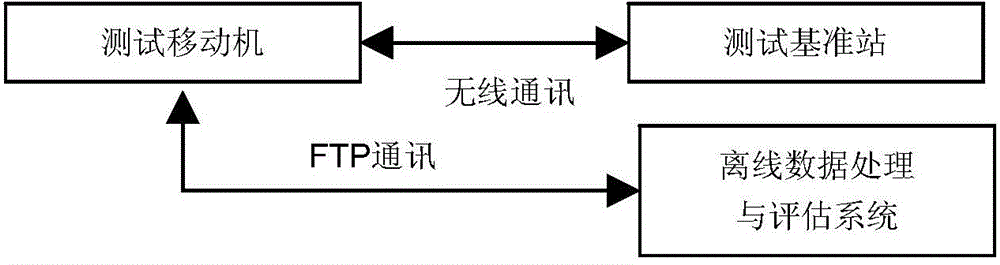
[0046] figure 1 It is a diagram of the system composition of the autonomous mobile robot navigation and positioning performance test device, including the test base station, the test mobile station composed of the digital transmission receiver, the GPS receiver and the online GPS data acquisition and processing computer, the offline data processing and evaluation system, and the test The base station and the test mobile station use wireless communication, and the test mobile station and the off-line data processing and evaluation system use FTP communication. The mobile reference station receives the correction information of the test reference station in real time to realize the running track test of the autonomous mobile robot under test.
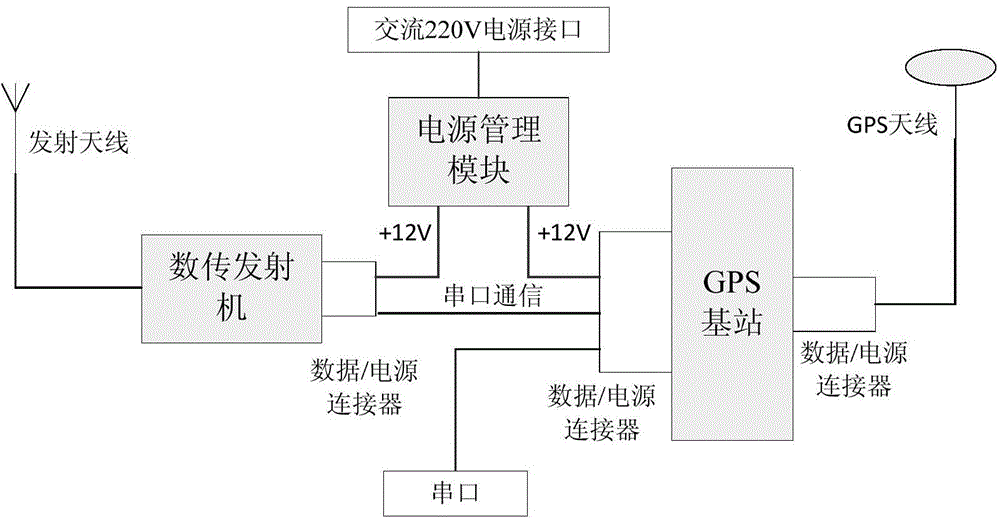
[0047] Such as figure 2 As shown, in the test reference station, the power management module realiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More