

Spherical robot with in-situ rotation function carried with control moment gyro
A technology for controlling moment gyroscopes and spherical robots. It is used in motor vehicles, transportation and packaging. It can solve the problems of poor ability to climb over obstacles, low motion stability, and inability to rotate in place. Flexibility, high climbing ability, easy installation and placement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with accompanying drawings and examples.
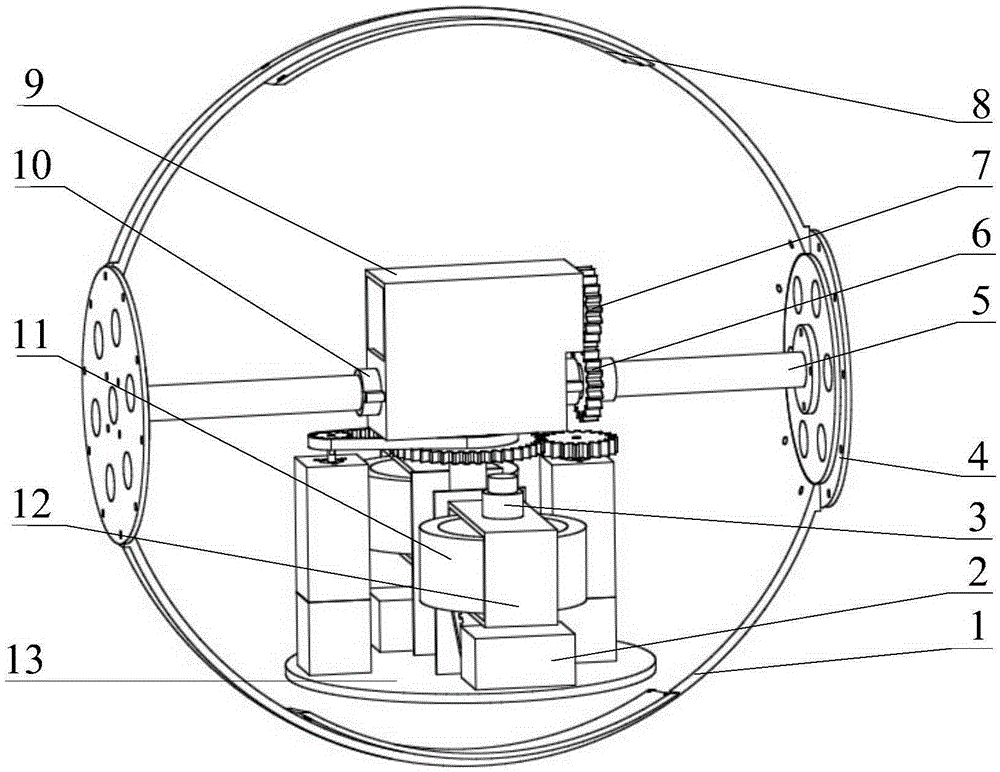
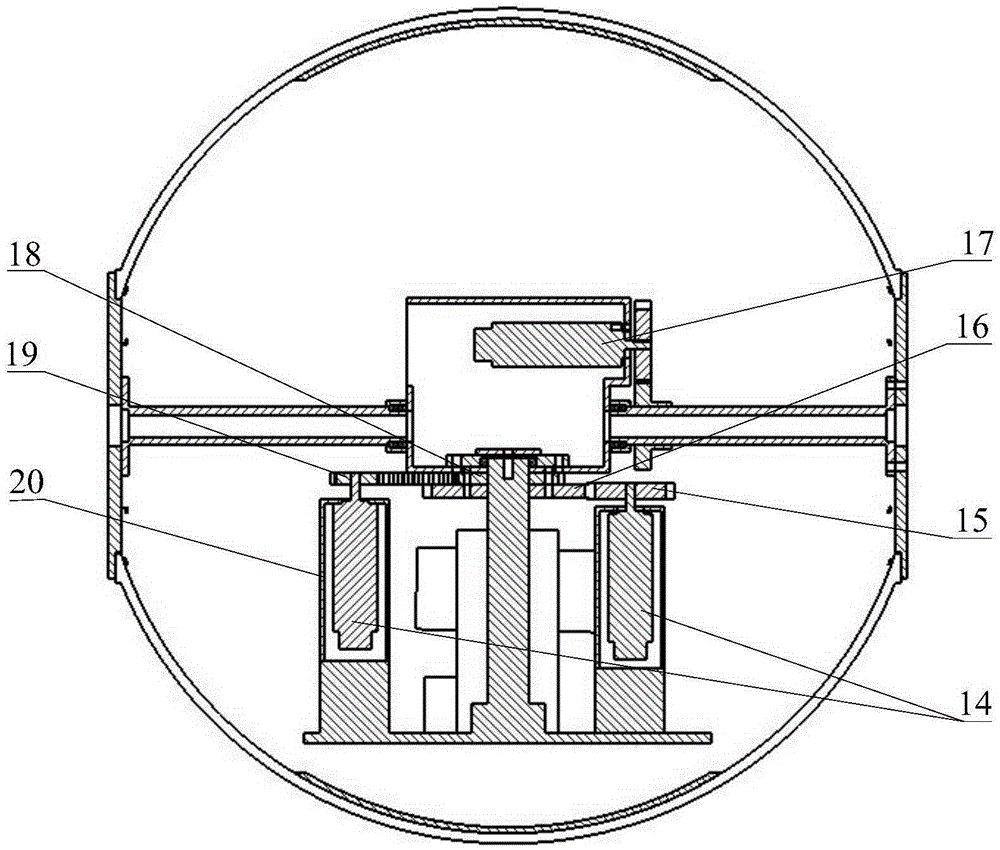
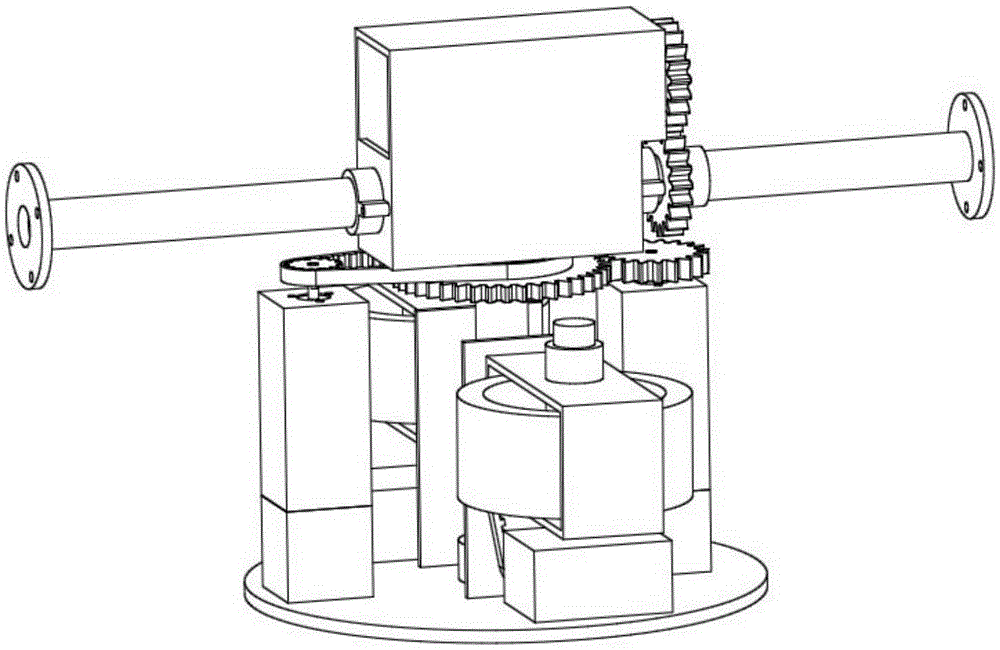
[0030] Such as figure 1 Shown is the structural diagram of a spherical robot equipped with a control moment gyro and capable of rotating in place. figure 2 is the cross-sectional structure diagram of the spherical robot. image 3 It is the internal frame and re-swing structure diagram of the spherical robot. Figure 4 It is a side view of the internal frame and the re-swing mechanism. Figure 5 It is a top view of the internal frame and re-swing mechanism. Figure 6 It is a sectional structure diagram of the internal steering mechanism. Figure 7 It is the structure diagram of flywheel rotor and frame. Figure 8 B-B is the sectional structure diagram of flywheel rotor and frame.
[0031] As shown in the figure, the outer spherical shell of a spherical robot equipped with a control moment gyro and capable of in situ rotation is mainly composed of two hom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More