

A steel wire transmission joint with the function of compensating for the movement of the rope out
A technology of transmission joints and steel wires, applied in the field of transmission joints, can solve the problems of poor reliability of drive joints, low energy transmission efficiency, and small space for robots, and achieve the effects of small transmission errors, increased use range and space, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
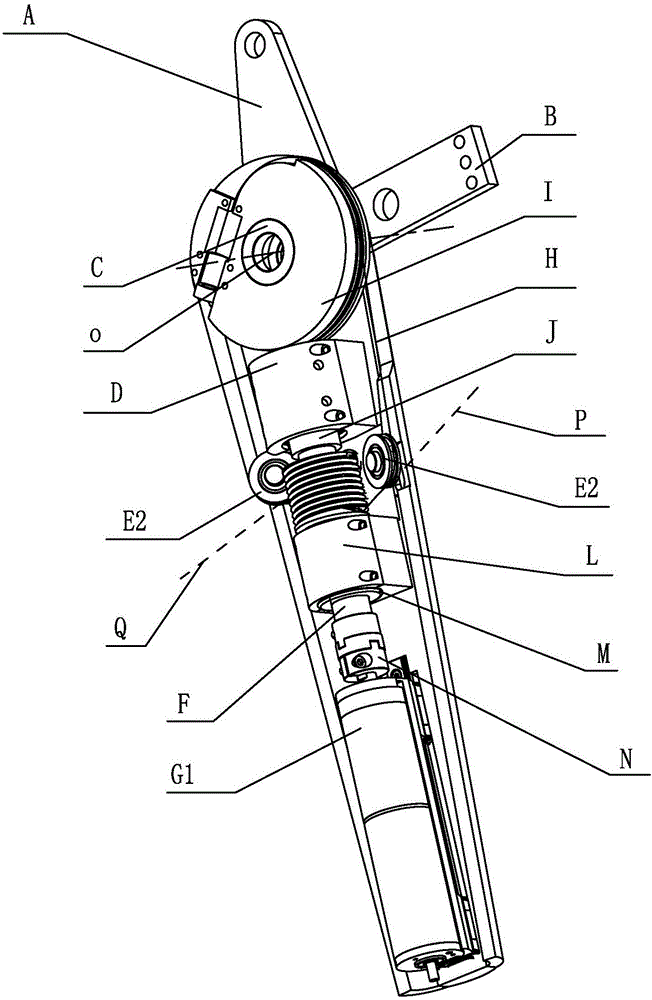
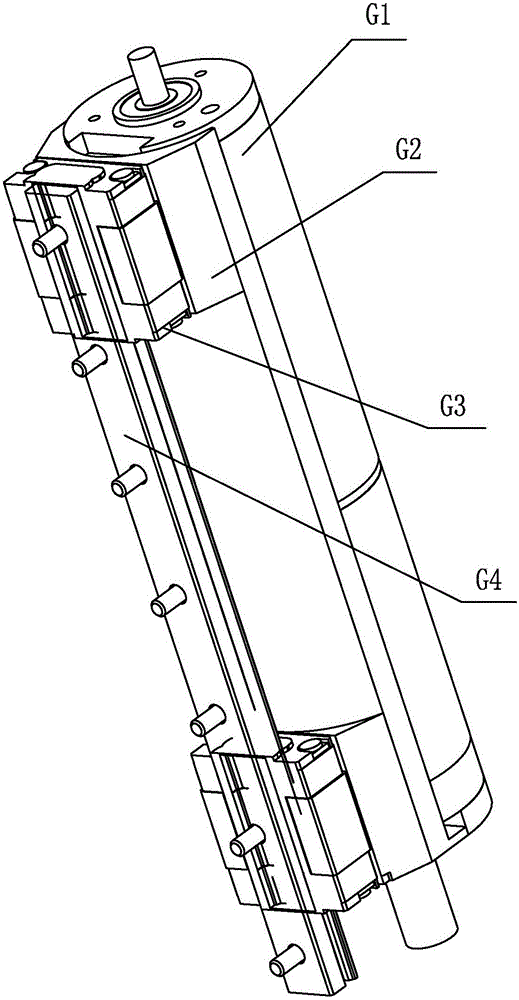
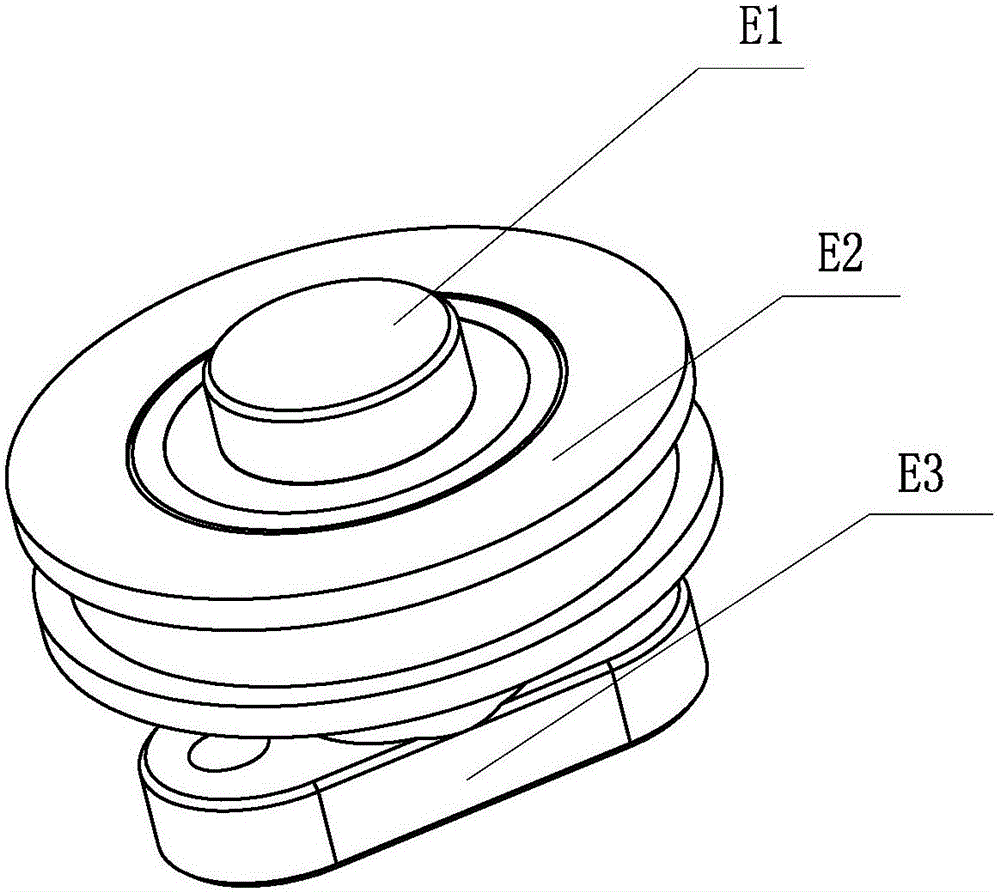
[0020] Specific implementation mode one: combine Figure 1-Figure 4 Illustrate, a kind of steel wire transmission joint with the movement compensation function of the rope outlet point of this embodiment, it comprises forearm and big arm; Screw pair, motor G1, linear bearing housing L, linear bearing M, wire rope H and two wire rope steering wheels E2; the boom includes bearing housing C and boom housing B;
[0021] The motor G1 is slidably installed on the forearm seat A, the motor G1 moves along the axial direction of the motor shaft, the output end of the motor G1 is connected with one end of the screw shaft F, the linear bearing seat L is installed on the forearm seat A, and the linear bearing M Installed on the linear bearing seat L, the screw shaft F is inserted on the linear bearing M, the other end of the screw shaft F is connected with the lead screw F2 of the screw pair, and the nut J of the screw pair is arranged on the forearm seat On the nut seat D on A, the scre...
specific Embodiment approach 2
[0023] Specific implementation mode two: combination figure 1 Note that the screw pair in this embodiment is a ball screw pair. With such setting, the transmission efficiency is high, and the operation is stable and reliable. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0024] Specific implementation mode three: combination figure 1 It should be noted that the wire transmission joint with the function of compensating the movement of rope points in this embodiment further includes a coupling N through which the output end of the motor G1 is connected to the screw shaft F. With such setting, the dynamic performance of the shafting system is improved, and the operation is stable and reliable. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More