

Monocular vision based front vehicle detection and ranging method
A front vehicle, monocular vision technology, applied in the direction of sight distance measurement, distance measurement, mapping and navigation, can solve problems such as light sensitivity, achieve the effect of simple method, improve detection accuracy, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
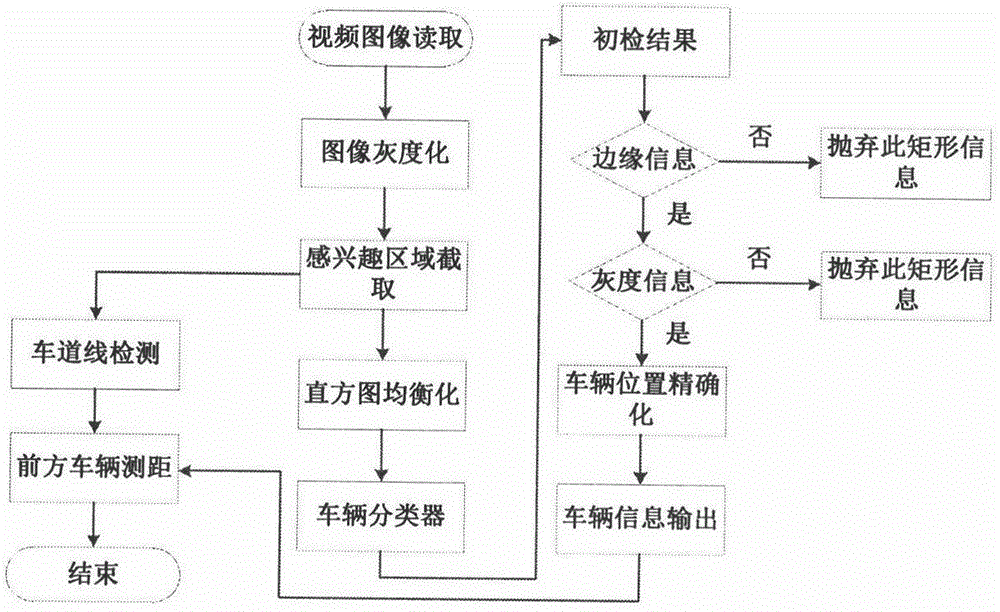
[0029] The flow chart of the present invention is as figure 1 As shown in Fig. 1, the video image collected by the vehicle camera is first converted into a grayscale image, and then the region of interest is selected according to the imaging range of the camera for histogram equalization, and then the equalized image is initially detected by a classifier to obtain a rectangular area containing vehicle information And use prior knowledge to verify the initial inspection results to remove false detections, and finally use the bottom shadow of the vehicle to calculate the intersection line between the tire and the ground to obtain the exact position of the vehicle, and use the vehicle position and lane line detection results as prior information for vehicle distance measurement . The specific implementation process of the technical solution of the present invention will be described below in conjunction with the accompanying drawings.
[0030] 1. Get the image and grayscale it ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More