

Mobile robot formation control method based on leader-follow
A mobile robot and follower robot technology, applied in the direction of non-electric variable control, position/direction control, control/regulation system, etc., can solve the problems of lack of formation guarantee, poor formation stability, follower movement deviation, etc., to ensure reliability , improve stability, and make up for the effect of formation deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing:
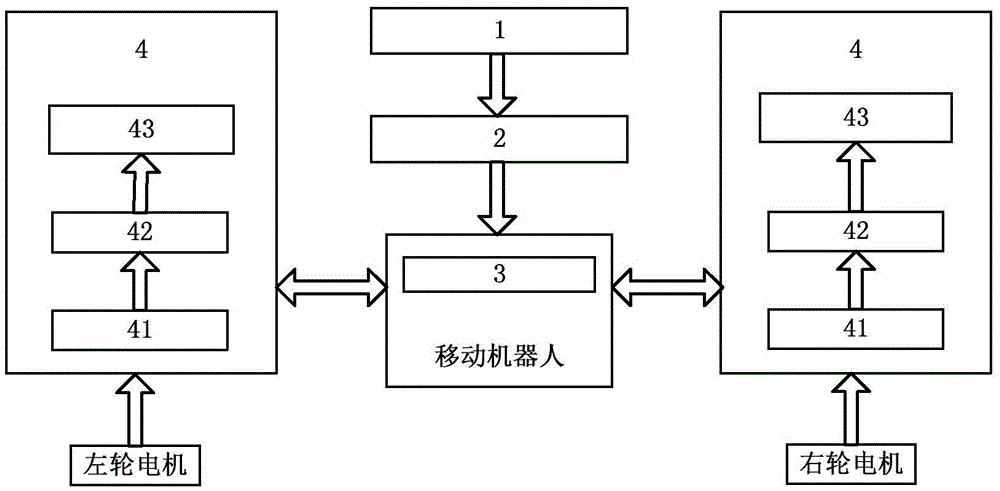
[0029] Such as figure 1 As shown, the control method of the present invention includes a global positioning system 1, a wireless communication system 2, an algorithm processing system 3, a speed control system 4, and mobile robots of different colors; Identify and collect the pose information of the mobile robot; the wireless communication system sends the collected pose information to each robot in the form of UPD broadcast; the algorithm processing system performs motion control and coordinates formation according to the received pose information of each mobile robot Algorithm processing, and continuous information interaction with the speed control system, the speed control system collects and processes the speed information of each mobile robot, continuously makes feedback on the actual control output, corrects the speed deviation in real time, and finally completes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More