

Route planning method and system based on genetic ant colony algorithm
A technology of path planning and ant colony algorithm, applied in genetic rules, genetic models, two-dimensional position/channel control, etc., can solve problems such as blindness of ant colony algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
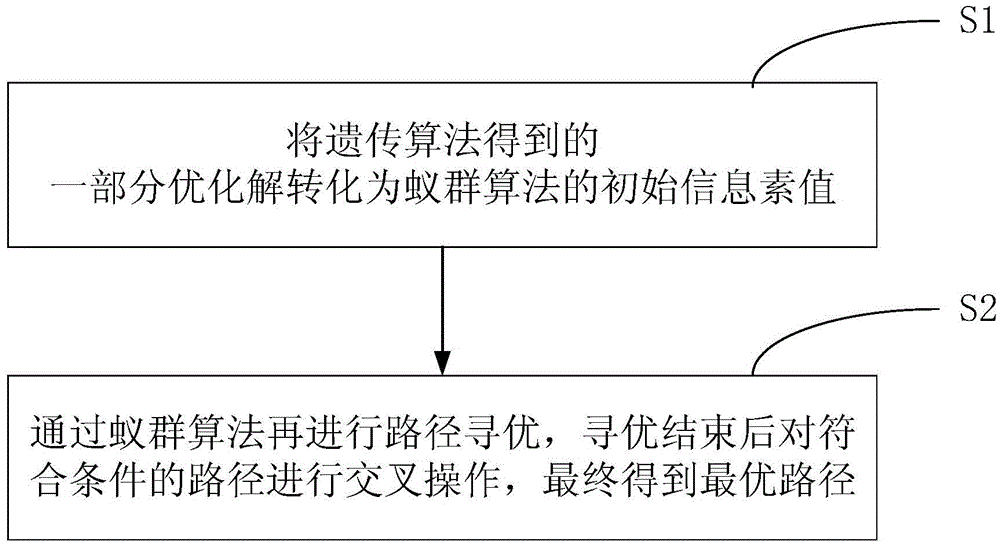
[0067] Such as figure 1 and figure 2 As shown, Embodiment 1 provides a path planning method, including the following steps:
[0068] Step S1, converting a part of the optimized solution obtained by the genetic algorithm into the initial value of the pheromone of the ant colony algorithm;
[0069] In step S2, the path optimization is carried out through the ant colony algorithm, and after the optimization is completed, the cross operation is performed on the qualified paths, and finally the optimal path is obtained.
[0070] As the initial value of pheromone for ant colony algorithm An optional implementation of .
[0071] In the step S2, the method of converting a part of the optimized solution obtained by the genetic algorithm into the initial value of the pheromone of the ant colony algorithm includes:
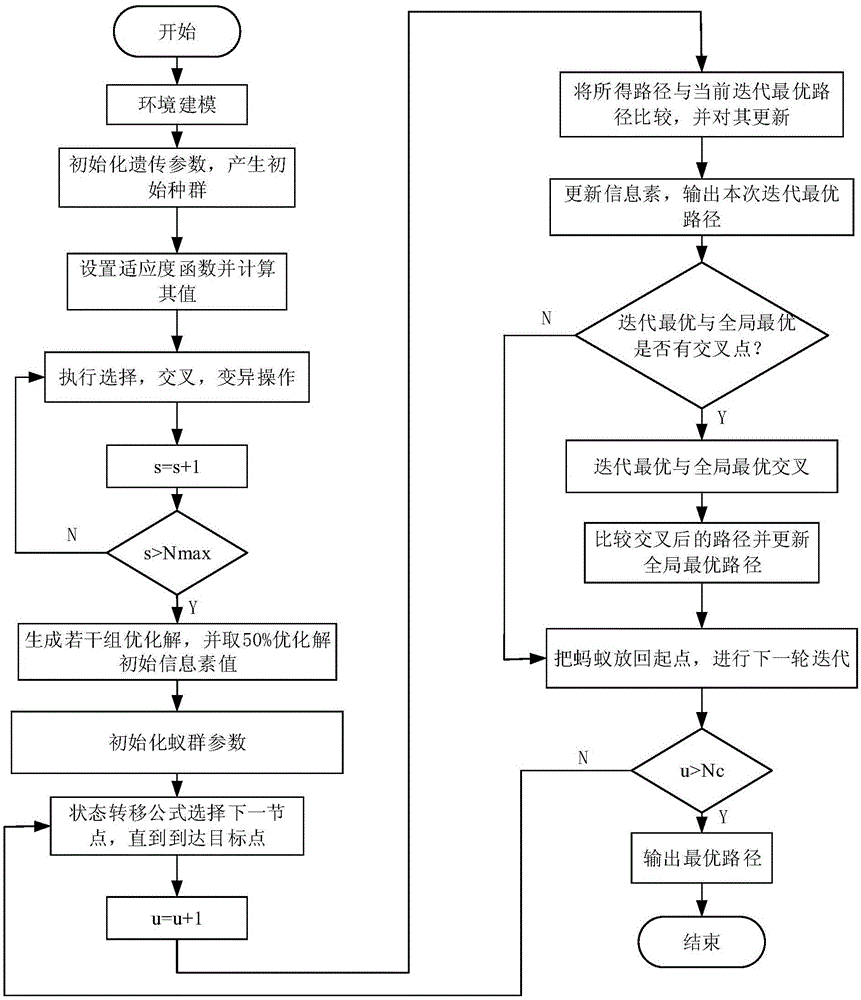
[0072] Step S11, modeling the environment;
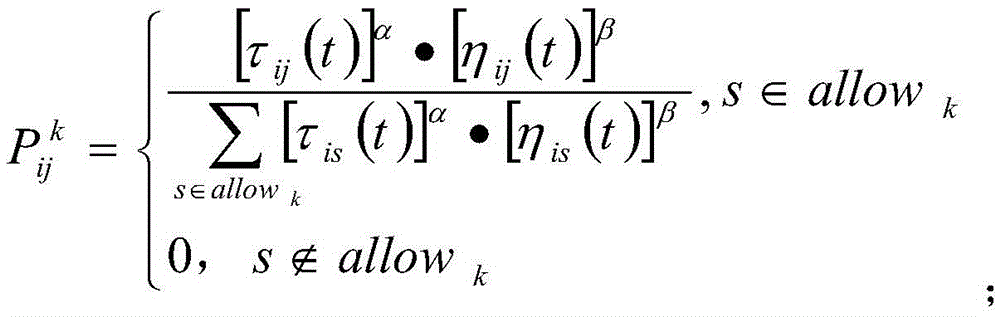
[0073] Specifically, the environment modeling, that is, the starting point of a certain object is the coordinate origin, ...
Embodiment 2
[0109] Such as figure 1 and figure 2 As shown, on the basis of embodiment 1, this embodiment 2 provides a path planning system, including:
[0110] A pheromone obtaining module for obtaining an initial value of the pheromone of the ant colony algorithm, and
[0111] An optimal path acquisition module connected with the pheromone acquisition module.
[0112] The pheromone acquisition module is suitable for converting a part of the optimized solution obtained by the genetic algorithm into the initial value of the pheromone of the ant colony algorithm; that is, modeling the environment, initializing the genetic parameters to generate the initial population; setting the fitness function, and calculating each the fitness of the population; and convert the top 50% group solutions with higher fitness into the initial value of pheromone for the ant colony algorithm Get initial value of pheromone For the specific methods involved, please refer to the related discussion of Exampl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More